Inductive proximity sensors are suitable for many applications. Selecting models with factor 1 capability makes them even easier to employ for sensing targets of varying metals.
By Andrew Waugh, AutomationDirect
Almost all forms of machine and equipment automation rely on accurate presence sensing of physical elements. Proximity sensors, also known as prox sensors or prox switches, are a great way to achieve this in many applications. Their non-contact operation makes them long-lasting, and their solid-state nature makes them very reliable. Proximity sensors can therefore improve the overall ruggedness and reliability of almost any automated sensing system.
Inductive proximity sensors are specifically designed to sense ferrous metals, while capacitive sensors can detect metallic and non-metallic targets. Inductive technology is preferred for many machine sensing applications for several reasons. Metals are prevalent, rugged, cost-effective and easy to use as targets on machines. Because inductive sensors inherently cannot see other materials, they are not easy fooled by stray materials, dust, water or other environmental elements.
As with any other automation element, some consideration is needed to select the right sensor for the application. This includes the desired form factor, the expected sensing distance and the target material. One downside of standard proximity sensors is the sensitivity of a given model when used on varying metal target materials, particularly ferrous and non-ferrous types. This leads to the need for specifying multiple models to meet the requirements of different applications.
A special class of inductive proximity sensors featuring correction factor 1 address this issue by providing a constant sensing range without adjustment regardless of the target metal. We’ll examine some proximity sensor considerations and show how factor 1 sensors can help with automation sensing needs.
Inductive proximity sensors are compact and reliable, providing a suitable way to sense the presence or absence of metal for automation applications. All figures courtesy of AutomationDirect
Limitations of standard inductive proximity sensors
For sensing the presence or absence of metals, inductive proximity sensors are the devices of choice (Figure 1). Traditional versions of these sensors generate and sense electromagnetic fields using a single ferrite core and coil. When a metallic object moves into and interacts with this field, the switch operates to indicate its presence.
Proximity sensors react to different metals at different distances, making the range dependent on the object material. A nominal target is generally considered to be mild steel, so the correction factor in this case is 1 (or k-factor = 1, sometimes shortened to K1). Other metals with little or no ferrous content will exhibit a reduction in sensing distance, and each sensor manufacturer will provide data sheets indicating the k-factor for certain materials.
For instance, a certain proximity switch might be specified as offering a 3-mm sensing distance with a k-factor of 0.5 when the target is aluminum. Therefore, the effective sensing distance in this case would actually be 1.5 mm.

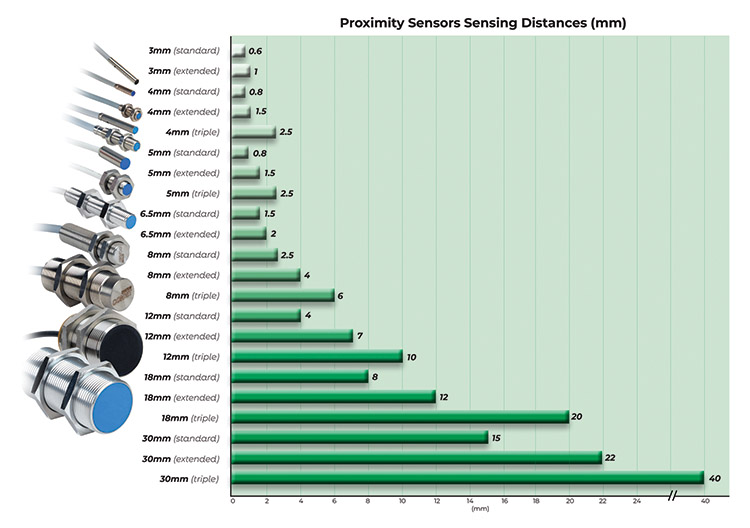
Standard proximity sensors are available in a variety of diameters and sensing distances, but each must be carefully matched to the application.
In order to meet various end user needs, proximity sensors are available in a cylindrical form factor varying from 3-mm diameter up to 30-mm diameter. Generally speaking, the larger the diameter the greater the sensing distance. In addition, within any given size there may be standard (1X), extended (2X), triple (3X) and even some quadruple (4X) sensing distance variants (Figure 2). So, there are many options, but the sensing range in relation to the correction factor must be evaluated for every location.
Other considerations may be applicable to all forms of proximity sensors. For instance, if a sensor will be installed in flush-mount or metal location, it will need to be rated for that service so the mount will not affect its performance.
Accommodating a sensing distance that varies under differing conditions is not ideal. For end users with diverse sensing needs, it means more types of devices will need to be specified and stocked, and also requires various installation clearances to achieve proper sensing. Factor 1 prox sensors provide a solution to this problem in a cost-effective manner.
Factor 1 sensors address issues
A suitable inductive proximity sensor would have the same range and sensitivity for metal targets of any type. Common industrial targets other than mild steel could be stainless steel, aluminum, copper, brass and more. Ideally, no adjustments or special accommodations would be required to use this sensor throughout a machine.
In practice, this has been achieved with updated technology that can deliver proximity sensors with a k-factor of 1 for all metals. Various approaches enable factor 1 sensors to achieve better sensitivity, while adding discretion to sense the presence of varying metal materials. The result of this technology is a constant sensing range for all types of target metals. This greatly simplifies the design, application, commissioning and stocking of proximity sensors.
Factor 1 inductive proximity sensors deliver many benefits over traditional technology, making them the right choice for many new and retrofit applications, especially since they carry little or no cost premium.
The most basic advantage is the improved sensing range for all metals, not just steel. This means the sensor can be mounted with increased clearance from moving parts, minimizing the chance of damage. Their greater sensitivity also ensures less fine-tuning adjustment is needed to sense challenging metal targets.
For production applications where product changeovers involve different metals that must be sensed, factor 1 technology is an obvious choice. But even on machinery and equipment where few changeovers are expected, it is often possible that targets of various metal types will need to be sensed.
Because factor 1 sensors are more adaptable, design effort is saved — as there is less demand to select among multiple devices for an application. This allows the machine builder to source the required sensors earlier in the design process, and then quickly move on to the next challenge.
New design work benefits from factor 1 sensors because engineers can focus on standardizing for consistency, and this also results in fewer parts needing to be stocked. For all the noted reasons, these improved sensors are also appropriate for retrofit applications as long as mounting, sensing distance and electrical compatibility are confirmed. For new and existing applications, the best reason for using standard prox sensors it to match existing in-service equipment or stocked items.
Regardless of the sensor type selected, it must be rated for the environmental conditions. Factor 1 sensors are readily available in stainless steel versions rated up to IP69K for high pressure and temperature washdown, so it is likely a version will be available to fit most applications.

K1 proximity sensors provide consistent sensing ranges for many metal target materials — and good value when evaluating cost versus sensing distance.
Design considerations
Although K1 sensors should be able to detect all metals at the same distance, it is important to assess each real-world application (Figure 3). The case where a sensor position is fixed (and various types of metal targets are passing by) it is very specific and not necessarily prevalent in the industry. However, capability does demonstrate product versatility for cases where the designer is using a single K1 sensor model to replace several varying instances on a machine or system, thus reducing the maintenance stock.
The greatest benefit of K1 sensors revolves around the cost versus distance evaluation. Sensors increase in cost as the sensing range increases, within a given housing size and material type. Looking at a typical 12mm flush sensor, for example, the standard sensing range is 2mm, extended is 4mm, triple sensing is 6mm and quad sensing is a whopping 8mm of range.
As the range doubles so, in general, does the cost. If the application is to sense stainless steel, then the associated correction factor causes the range to be reduced by 30%. This results in spending more money to obtain a triple sensing model to effectively deliver extended sensing range.
K1 sensors can cost around the same as extended sensing proxes and still deliver that same range on any metal. By using K1 sensors, not only can designers obtain a better cost-to-range value, they can also reduce the variety of maintenance parts and future-proof design installations from any changes to the target material.
One ruler?
Inductive proximity sensors are a mainstay for sensing metal presence in all forms of industrial and machinery automation due to their superior durability and reliability. However, traditional sensors have been somewhat application-specific, requiring substantial design effort to select the right sensor.
Factor 1 sensors use dedicated sensor and receiver coils to overcome this deficiency and are therefore able to sense varying metal targets with a constant range and sensitivity. Not only does this make factor 1 sensors more adaptable for new applications, it also allows them to be retrofitted into existing systems. This flexibility reduces the design effort and allows users to minimize the number of sensor parts in stock. Because all of these benefits are available at little or no cost difference, the choice is clear to move forward with factor 1 inductive proximity sensors in most applications.
Filed Under: SENSORS



