 Autonomous or automated guided vehicles (AGVs) are those compact wheeled conveyances that tote, tow, trailer, lift, shift, rotate, rack and store, or otherwise transport goods along defined paths set by guidance systems. New iterations of these robotic designs are on the rise. In fact, AGVs — a relatively mature technology in the field of robotics — make a $850 million (global) market set to grow at 10% CAGR or better in coming years.
Autonomous or automated guided vehicles (AGVs) are those compact wheeled conveyances that tote, tow, trailer, lift, shift, rotate, rack and store, or otherwise transport goods along defined paths set by guidance systems. New iterations of these robotic designs are on the rise. In fact, AGVs — a relatively mature technology in the field of robotics — make a $850 million (global) market set to grow at 10% CAGR or better in coming years.
This is partly due to the aim of manufacturing, assembly, logistics, and distribution plants and warehouses to lower labor costs with automation and lean processes. Right now, the automotive industry dominates AGV use (at 25% of all applications) but growing drivers are global industrialization, e-commerce, and interest in leveraging IIoT functionality (with integration of automation with enterprise-level operations) in an array of other industries.

Shown here is a train of 20-kg RC20 AGVs from Vecna Robotics. RC20 RGVs carry individual totes or containers, and gang to form virtual conveyors — imparting far more flexibility than traditional conveyor systems.
Software (and control, guidance, and collision-avoidance electronics) on today’s AGVs have enhanced their affordability and functionality. Kion Group (which owns what was Egemin — now part of Dematic) offers no fewer than six AGV software modules for warehouse management, safe AGV movement and AGV traffic optimization, navigation and mapping, and overall coordination of material flow. Another standout offering is Transbotics Movement Optimizer software developed by Transbotics Corp. engineers to let AGVs transmit and receive system and IoT-level data to communicate vehicle status, inventory information, and other controls.
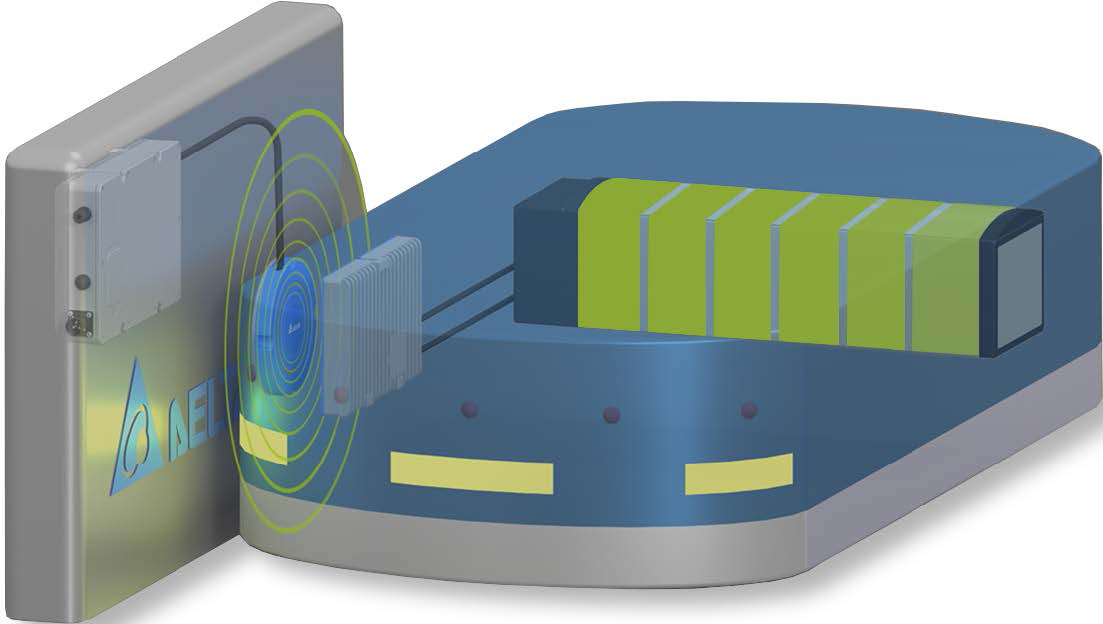
Meanwhile, battery innovations (in type, capacity, and approaches to charging) have made AGVs increasingly practical. One representative innovation in 2017 came from Delta Products in the form of a new (and 93% efficient) wireless charging system for AGVs. Based on coil-to-coil induction, it simplifies and ruggedizes the battery-charging process — particularly helpful for making self-charging and opportunity-charging AGVs more reliable. Still other rather exotic AGV installations are omitting the battery altogether and using continuous inductive power transfer (IPT) to power coordinated fleets of AGVs (through cables embedded in shallow floor channels) during operation. More after the jump.
Of course, the real strength of AGVs is their simple implementation — and the way in which they prompt smart facility-process and material-handling improvements. While traditionally lacking the full flexibility of vision-guided and self-driving vehicles that navigate unpredictable environments on the fly, many newer AGVs allow for excellent functionality (with small detours and the like) as well as configurability when predefined navigation routes need changing. Case in point: Omron Adept Technologies now sells self-navigating Lynx-brand AGVs it bills autonomous indoor vehicles (AIVs) that mostly follow magnetic-tape roads, but can also enter and exit the road paths to perform special tasks — even while navigating around people and unplanned obstacles.
Some technology ecosystems even aim to address unify the builds of AGV navigation, hardware, and software. NDC8 from Kollmorgen’s NDC Solutions is one such generic and scalable ecosystem. It works with an array of AGV navigation types, including multi-navigation setups that serve multiple facility areas (such as assembly areas and storage areas, for example) needing different AGV modes of piloting.

Kollmorgen NDC Solutions offers AGV solutions that enable natural, laser, spot, magnetic, magnetic-tape, inductive, inductive-wire, and multi-mode navigation. New-York-based research group Future Market Insights predicts that emerging economies and the healthcare industry will spur the most AGV adoption to make it $2.5 billion market over the next decade. Image courtesy Kollmorgen • NDC Solutions
Increasingly common in many AGV designs is laser-guided navigation. Consider the proliferation of application-specific AGVs from OEM JBT Corp. — including those specifically for hospital, trailer loading, and automated batch retort installations. Most use laser triangulation to track reflective strips of tape that trace paths through the facilities. In contrast, Kuka AG takes it a step further with its KUKA.NavigationSolution — an autonomous navigation system for AGVs that uses software, laser scanners, and wheel sensors to map facility environments with what’s called simultaneous localization and mapping (SLAM). Such functionality takes their vehicles’ capabilities to beyond what most of industry defines as AGV operation and into fully autonomous-vehicle territory.
Filed Under: The Robot Report



Tell Us What You Think!