Designers and engineers typically try to avoid or mitigate friction in linear motion systems. Although friction isn’t always bad — in some applications, it can provide a damping effect and help improve servo tuning — when it comes to linear motion systems, it increases the amount of force required to move a load, creates heat, […]
Motion basics: What are degrees of freedom (DOF) and how many are there?
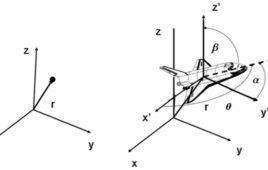
To identify the position of an object in three-dimensional space, we use a coordinate system that defines three axes: X, Y, and Z. If the object is a point mass, we only need three coordinates (X, Y, and Z) to locate its position. But a rigid body can both move, or translate, along these three […]
How does hysteresis affect piezo actuator performance?
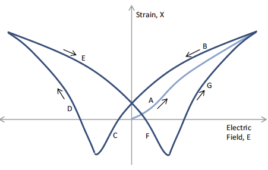
Piezo actuators operate on the principle that application of an electric field (voltage) induces strain (displacement) in the material — a phenomenon known as the inverse piezoelectric effect. But if you plot the strain versus the electric field of a piezo material, you’ll see that the strain doesn’t follow the same path when the field […]
Single-axis linear stepper stages with integrated encoder and electronics package

H2W now offers a revolutionary series of single-axis linear stepper stages that integrates a linear encoder into the stage to operate the linear stepper motor as a 2-phase brushless motor when coupled with an advanced motion control electronics package provided by H2W. When operated this way, the motors will tend to run cooler, as they […]
What makes a linear stage different from other types of linear motion systems?

Linear motion systems — consisting of a base or housing, a guide system, and a driving mechanism — are available in a wide variety of designs and configurations to suit almost any application. And because their designs are so varied, they’re often categorized according to key construction and operating principles. Case in point: The term […]
How to account for belt and pulley inertia during system design

In order for a motor to accelerate or decelerate a load, it must overcome the load’s inertia, or resistance to change in motion, as explained in Newton’s First Law. In belt-driven linear motion systems, the motor has to overcome not only the inertia of the applied load, but also the inertia of the belt, pulleys, […]
Motion basics: What is ball conformity in linear guides and screws?

In linear guides and ball screws, load-carrying balls or rollers can ride on planar (flat) raceways, as with non-recirculating linear roller bearings, or in curved raceways, as with ball screws and profiled rail guides. When a ball or roller rides on a planar raceway, the contact between the rolling element and the raceway will be […]
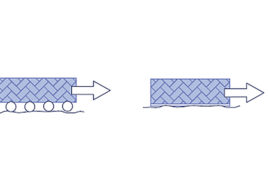
Motion basics: What is differential slip and how does it affect linear bearings?

Linear bearings that use balls or rollers are typically chosen for their ability to carry high loads with very low friction. But rolling elements — including linear bearings — are not friction-free. One of the factors that contributes to friction in linear bearings (along with properties such as surface roughness, elastic hysteresis of the materials, and […]
What’s the difference between ANSI and ISO ball screw load capacity?

The dynamic load capacity of a ball screw is typically defined by the DIN ISO 3408-5 standard, or in some cases, by the JIS B1192-1997 standard, both of which use 1 million revolutions as the basis for load capacity. However, some manufacturers determine ball screw dynamic load capacity according to the ANSI ASME B5.48-1977 standard (reconfirmed […]
Mechanical properties of materials: Hardness

Hardness is a common specification for linear shafts and guides — especially those used with ball and roller bearings, where the guide encounters extremely high loads over very small areas. The hardness of a bearing surface can significantly affect the life of the system and is often accounted for by applying a hardness correction factor […]
How does a vacuum preloaded air bearing work?

Air bearings provide several advantages over rolling element bearings, including higher travel accuracy and reduced friction and heat generation. But because air is compressible, air bearings can be less stiff and exhibit more deflection under load than similar rolling element bearings (although the stiffness characteristics of air bearings are very linear). However, the compressible nature of air […]
What is cage creep and why does it matter?

Several types of non-recirculating linear bearings use a cage to contain the rolling elements, maintain consistent spacing between them, and ensure even load distribution. But in each of these non-recirculating designs, the cage “floats” between the two moving components, meaning that it’s not constrained and can gradually move away from its intended, centered position. This […]
A guide to stainless steels for linear motion components

For applications that involve corrosive environments, designers of linear motion systems can take precautions such as using covers to protect vulnerable components, ordering parts with special coatings or platings, and strategically placing sensitive components within the machine or system to minimize their exposure to hazardous liquids or fumes. But some applications — due to the nature […]
What are some linear motion options for moving multiple loads independently?

From a mechanical standpoint, one of the more challenging applications in linear motion has traditionally been to move two or more loads independently, as is required in some handling, transport, and inspection applications. While using multiple linear systems, or preassembled actuators, is a simple solution mechanically, this option typically requires a significant amount of space […]
Recirculating roller screws: How do they work and what are their benefits?

Screw assemblies that use rollers as the load-carrying element come in several varieties, with the most common being the traditional planetary roller screw, which provides high load capacities and very high rigidity, capable of outperforming ball screw and hydraulic actuators in some heavy-duty applications. But another type of roller screw — the recirculating roller screw — […]
How to account for ball and lead screw inertia during system design

When sizing a motion system with a ball or lead screw drive, the first step is to determine the screw diameter and lead that can meet the application requirements for thrust force, speed, and compressive (buckling) loads. Once the screw diameter and lead are determined, the next step is to choose a motor that can […]
Ball and lead screw drunkenness: What is it and when does it matter?

Unlike ball screws, which follow industry standards such as DIN ISO 3408, JIS B1192-1997, or ANSI-B5.48 for accuracy classifications, there are no accuracy standards for lead screws. Instead, many lead screw manufacturers have loosely adopted two of the most common ball screw lead accuracy specifications: lead deviation per 300 mm and lead deviation per revolution. Lead deviation […]
What’s the difference between module and diametral pitch for rack and pinion drives?

Gear sizes are typically specified by one of two designations: module or diametral pitch. While both specifications define the size of the gear teeth, module and diametral pitch are calculated differently, with module (sometimes referred to as metric pitch) being the metric sizing standard and diametrical pitch being the Imperial (inch) sizing method. Standard modules for […]
Ball spline preload: How, why, and when it’s applied

Like other linear motion components where rolling elements ride in raceways, ball splines can be supplied with preload. In the case of a ball spline, the main purpose of preload is to reduce angular backlash — clearance in the rotational direction — when torque is applied. Without preload, ball splines have a small amount of […]
What’s the difference between moment and torque in linear motion applications?

In linear motion, we often deal with applications that involve forces applied at a distance from a linear guide — referred to as cantilevered, or moment, loads. In these cases, we’re concerned with guide’s moment load capacity, or its ability to resist rotating. But we also deal with components that should rotate when a force […]
What is ball screw whip and why does it happen?

Ball screws are often the drive mechanism of choice in applications that require high thrust forces with excellent positioning accuracy and repeatability. But one of the drawbacks of ball screw technology is that speed is inversely related to length — the longer the ball screw shaft, the more likely it is to whip, like a […]
What is a 7th axis (also known as an RTU) and when is it used?

Linear Cartesian and gantry robots are used extensively in automation, particularly for tasks such as pick and place and assembly. But for applications that require movements such as changing the orientation of a part or navigating around complex obstacles, the robot of choice is often the 6-axis articulated robot. Despite their dexterity, the reach of a […]
When does open-loop stepper control still make sense?

Stepper motors are inherently open-loop devices, able to make precise moves without feedback regarding motor position. But one of the drawbacks of using stepper motors in some applications is that if steps are lost (or gained), the system has no way to detect this. The resulting discrepancy between the actual position of the motor and […]
The benefits – and drawbacks – of linear motors for dynamic applications

Linear motors can achieve high acceleration rates and long travel lengths with good thrust forces and extremely high positioning accuracies, while other drive mechanisms, such as belts, screws, or rack and pinions, must sacrifice at least one of these requirements in order to achieve the others. This is why linear motors are the preferred choice for […]
What’s the difference between a vertical lift stage and a Z axis actuator?

In many applications that require vertical motion, a Z axis actuator is combined with one or two horizontal axes in a Cartesian or gantry-style arrangement. In these multi-axis configurations, the moved load is mounted to the Z axis via a bracket, creating a moment load that affects not only the Z axis, but also the horizontal […]