By Tom Solon, P.E., Application Engineer, Haydon Kerk, Waterbury, Conn.
The motion control world has its jargon and buzzwords. Some are used interchangeably leading to ambiguity and possible confusion. Backlash and stiffness are both important but have different impacts, and those differences deserve attention.
Backlash and stiffness are two important properties associated with motion control systems. Backlash is a characteristic of a mechanical drive system; clearances among the elements create slop when stationary, and dead play during reversals. Stiffness, on the other hand, is a property of a mechanism or a component and is simply the resistance to deformation or deflection when under a load.

Components such as these anti-backlash leadscrew nuts can be a quick and easy way to eliminate backlash.
In general, backlash is considered a negative characteristic, but it can often be tolerated. In applications requiring precise positioning, backlash can create uncertainty and inaccuracy. Backlash is usually thought of when motion is reversing. When running open-loop or using only motor position to determine linear position, backlash introduces inaccuracy when changing direction. In addition, when a system is at rest, backlash can allow free play and unwanted motion leading to vibration, noise and diminished performance.
Sources of backlash are primarily tolerances, fits and clearances that may develop over time with mechanical wear. Screw threads, gear teeth, and pulleys all have manufacturing tolerances at both the component level and in their positions relative to mating components in an assembly.
But backlash can also be beneficial. The clearances that create backlash can provide allowance for misalignment or even enough clearance to pass contaminants. For instance, thermal expansion and contraction can often cause problems, but if some backlash can be tolerated in a design, the additional clearance can accommodate the changes and prevent binding. And if the system can tolerate a small amount of backlash, then this can save costs by not having to source more expensive, higher precision components.
For example, consider a metal lead screw with a polymer nut used in an outdoor laser leveling system. Conventional thread clearances caused binding in the equipment because it was used in the Arctic zone in winter. But increasing the backlash in the thread fit eliminated the binding while still staying within the equipment’s functional tolerances.
Backlash can be eliminated in a number of ways including using precision manufactured components that minimize backlash. Another way is through preloading, which can eliminate or at least minimize backlash. Typically, preloading is done using some type of spring mechanism. Most systems require that the preload exceed any applied load to prevent backlash. But such a preload increases friction and accelerates wear, while consuming part of the load capacity. Preload mechanisms usually add to the complexity, size and cost of the assembly.
A motion control assembly without clearance and interference is difficult and usually expensive to build. When properly executed, the resulting motion can be precise and smooth. However, such a system can be quite tenuously balanced because a small change in conditions, a small amount of wear, or minor movement of the assembled equipment can reintroduce binding or backlash.
Backlash Gets A Bad Rap
Unfortunately, it’s also common to characterize any unwanted motion as backlash, which often leads to misdirected efforts and unnecessary added costs. More often than not, it’s material and system stiffness that should be considered when dealing with backlash.
The big difference between errors caused by backlash and stiffness is that backlash is independent of the load and is usually detected with light loading. Motion resulting from lack of stiffness (or compliance) is proportional to loading. If movement versus loading is plotted, backlash is characterized by measurable movement at constant, very low loading. Usually, system drag and inertia create enough resistance to reveal any backlash when the direction of motion is reversed. However, compliance is characterized by increasing movement with increasing loading. Depending on the stiffness, a significant amount of force may need to be applied in order to detect compliance.
If there is any backlash in the system, then when the load is removed, the system will not return to the original starting position on its own. Usually, it will need a restoring force to return to the original position. If any compliance is in a component, on the other hand, the system will usually recover on its own once the load is removed. Depending on the materials, compliance could cause a delayed or incomplete recovery (hysteresis) or permanent (plastic) deformation.

A motion control system with an integrated slide and high-precision stepper motor can help to minimize backlash and increase stiffness in a system.
Even though no material is perfectly stiff, metals and ceramics may be close enough for most applications. Plastics, elastomers, and fluids offer varying stiffness that must be considered when they are part of the critical path in a system. Stiffness is a property that can be measured, and in many cases selected or adjusted through careful material selection. Any undesired movement resulting from insufficient stiffness is in addition to that created as a result of backlash. The challenge is that deflection or deformation caused by compliance can create the same symptoms as backlash, where none previously existed. And once the system is at rest, that backlash may disappear.
Design Considerations
Let’s say you’ve already selected a system to eliminate backlash, but you still experience accuracy problems. When you find a problem, how can you determine whether it’s caused by backlash or stiffness? First, remember that true backlash is detectable in a static condition, where there is no preload. A good starting point is to look at the dynamic load. Acceleration and pressure, both positive and negative values, create dynamic loads that can expose stiffness problems.
Also, remember that some compliance, or lack of stiffness, can be a good thing. Compliance can provide some damping to reduce vibration and noise as well as offering some cushion to reduce shock. However, it’s still important to consider the effect compliance will have on positional accuracy in your application.
Now, onto the design considerations. The first step is to define the requirements of your motion. Does position have to be accurate to the nearest millimeter, micron, or inch? What is the maximum applied dynamic load?
Next, determine if you need to consider backlash. If gravity or another preload is always acting in the axis of motion and the force is greater than the maximum dynamic load, then backlash will not be a factor because it will already be eliminated by the preload. The effects of backlash can also be eliminated if positions are always approached from the same direction. In other circumstances, backlash will likely be a factor.
Compare the expected backlash with your requirements. If backlash alone equals or exceeds the allowable error, you’ll have to consider another option, most likely to either find a method to reduce the backlash or to increase your error budget. Sometimes, defining the motion profile such that you always slowly approach the critical positions from the same direction will take out the backlash. This can be an inexpensive solution. However, it may add too much time to each move. More often, the best solution involves an anti-backlash mechanism designed specifically to eliminate backlash error.

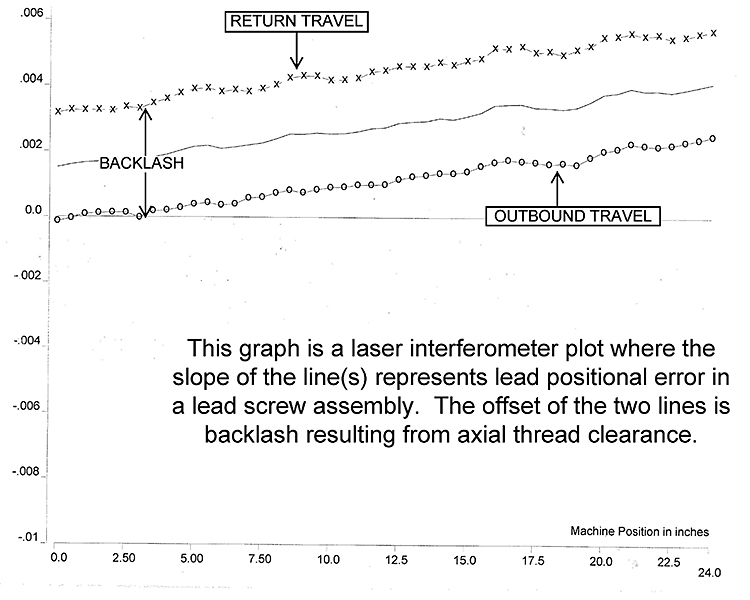
The calculations show how backlash is related to the axial clearance in a leadscrew.
Next, consider stiffness. For many applications, stiffness can be ignored. If there are no static forces present and all dynamic forces have a chance to settle out, stiffness won’t be a factor. At the other extreme, if there are large static loads, such as in pumps and syringes, clamping mechanisms, heavy-duty machine tools, or pick-and-place systems for heavy items, stiffness will affect how accurately the true positions match the theoretical positions. Similarly, high dynamic loads from moving heavy masses, rapid acceleration, switching direction, or varying resistance will highlight stiffness issues if positional accuracy during the move is important. An example of this is bi-directional printing where the offset caused by deflection has the same effect as backlash and causes misalignment between consecutive lines. In these cases, it’s wise to calculate or test whether stiffness will be a problem.
Technology Solutions
Fortunately, there are many component choices that can help solve these problems. In general, increased accuracy brings increased cost. But today, high accuracy can be had for a fraction of what the cost was only 10 years ago. High-accuracy step motors and anti-backlash lead screws, for example, can provide open-loop accuracy of +/- 0.01%.
Hi-tech composites, CNC machining and a global supply base now minimize the amount of compromise required. Today, semi-custom components tailored to your application are available at affordable pricing and reasonable lead times. If you’ve been using the same technology for five years or more, it might make sense to reconsider your designs.
Haydon Kerk
www.haydonkerk.com
Filed Under: Ballscrews • leadscrews, Machine tools + subtractive manufacturing, LINEAR MOTION, MECHANICAL POWER TRANSMISSION, Motion control • motor controls




Tell Us What You Think!