 Relays are electronic devices that accept current or voltage signals in an input circuit as a prompt to switch open or close another circuit or pilot device. In this way, relays are switches that are controlled by some other input. The output is to trigger a predictable state change in the connected system.
Relays are electronic devices that accept current or voltage signals in an input circuit as a prompt to switch open or close another circuit or pilot device. In this way, relays are switches that are controlled by some other input. The output is to trigger a predictable state change in the connected system.

This is the classic “ice cube” relay format.
Variations abound: Perhaps the most iconic relay design is the traditional socketed or “ice cube” format. This is a block-shaped relay having a clear plastic housing (for visual inspections of internal subcomponents) and an array of pins protruding from a base for plugging into a system requiring switching. But such ice-cube formats are only one of many for electromechanical relays, which we’ll cover shortly.
In fact, there are also a wide variety of solid-state relays (SSRs) for interlock and control functions on moving as well static operations. Traditional SSR formats include those with a classic “hockey puck” geometry and various “slice” shapes for DIN-rail mounting (covered in this motioncontroltips.com article on DIN-rail geometries).
In fact, particularly thin designs have a 6-mm-thick slice shape that’s fairly standard to other devices destined for tightly stacked DIN-rail installations. It’s a format most common for relays integrated with logic circuits to support industrial automation.
Relays operate in industrial machines, plant equipment, and even consumer-grade vehicles and appliances employing electrical power and control signals. More specifically, relays are common in marine, off-shore, and off-highway designs; food processing, communications, and plants that process petroleum products; power-station and substation control panels; office automation equipment (such as printers) and building management systems; home appliances such as washing machines and refrigerators; industrial machinery, programmable controllers, and robotics for automation; and vending machines as well as other entertainment installations. Automotive and process control are other leading markets that make copious use of relays — and have prompted their evolution over the decades.
To be clear, electromechanical relays at least don’t typically exact direct control over power-consuming components beyond some small motors and solenoids; they’re more commonly associated with control systems in automated designs. Refer to the motioncontroltips.com article on contactors (which do in fact exact direct control over motors and other power-consuming components) for more on this.
Just as relay races in track-and-field athletic events involve the continuation of some action (in this case, the carrying of a baton) so do industrial relays pass actions along in a sequence. So relays activated by a signal in one circuit (as from a machine-operator pushbutton) electromagnetically or electronically actuate another circuit (as in an electric motor on a high-voltage circuit).
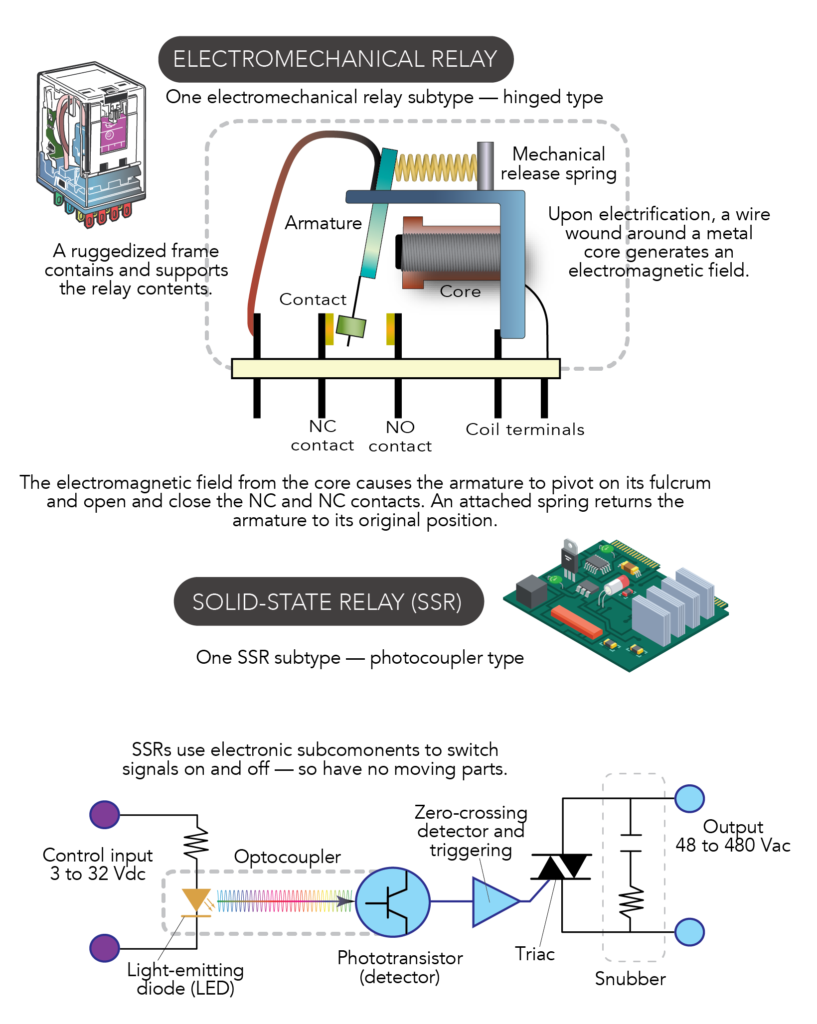
Electromechanical relays at their core have contacts that open and close a switch in response to input voltage or current signals on an input coil. A signal on that coil and its electromagnetic effect prompts a response from the attached circuit. Then the output circuit activates a preset system response.
Most relays fall into one of two categories …
Electromechanical relays
Electromechanical relays — which much of industry calls general-purpose replays, EMRs, mechanical relays, or simply relays — include those we briefly mention above. These are relays that work by transferring signals via the connection of mechanical contacts having moving elements that open and close the output circuit. Electromechanical relays often serve in systems to deliver simple current or voltage-based signals as well as on-off signals.
Note that the majority of relays in use today are these general-purpose (electromechanical) relays. Again, many manufacturers refer to electromechanical relays as simply relays — and solid-state relays as SSRs. Where the term relay appears alone, it’s usually same to assume that this refers to an electromechanical relay. However, in Design World editorial on this topic, we will use the relays’ full names for clarity.

Notice (foreground) the movable armature on this socketed electromechanical relay.
 Solid-state relays
Solid-state relays
Solid-state relays abbreviated SSRs are relays that transfer signals with contact-free electronic circuits sans the moving connections (and clicking sounds) of electromechanical relays. Sometimes called solid-state switching devices, SSRs employ semiconductors and electronics to trigger currents, voltages, or on-off signals. Refer to the Design World connectivity Design Guide for more information. With no moving subcomponents, SSRs turn on and turn off faster than electromechanical relays. Some SSRs can exhibit residual electrical resistance as well as current leakage, though that’s not usually an issue.

This electronic (solid-state) overload relay is a Siemens 3RB31134PB0 — a type of monitoring switchgear technology to ensure continuous motor and plant protection. It can be set at 1 to 4 A to allow engineers to apply it on various control axes — and standardize protection components across a plant. Auxiliary contacts include one NO and one NC. Image courtesy Automation24 Inc.
Of course, both relay types are governed by various industry and governmental standards. In wide use are NEMA Class A and B relay specifications. Relays designed to MIL-R-5757 specifications include those with contacts that can switch up to 10 A; MIL-R-6106 covers relays capable of switching to beyond that. Meanwhile the IEC classification system (primarily in IEC 61810, IEC 60050, and IEC-60255) defines the required performance of two relay types:
1. The IEC defines all-or-nothing relays as those for which input is either within the operating range (to trigger action) or effectively zero. These operate (set) and release (reset) based on input sans time delay. In some cases, all-or-nothing relays serve as auxiliary relays —energized by another relay to provide some amount of time delay; higher-rated contacts; or multiple outputs from one given input. These take the form of elementary relays (to serve in safety applications and elsewhere) as well as time relays.
2. The IEC defines measuring relays as those that operate (set) when a given quantity reaches a set value with some specified level of precision. For measuring relays, common parameters include measures of protections for interface equipment connected to controls, monitoring, and process subsystems.
You may also like:





Filed Under: AUTOMATION, Industrial automation, Relays



