Radio detection and ranging (radar) uses reflected radio waves to detect and determine the distance, angle, and velocity of objects relative to the radar system. A basic radar system consists of a transmitter producing electromagnetic waves in the radio or microwave spectrum (these can be pulsed or continuous), a transmitting antenna, a receiving antenna (often the same antenna is used for both transmitting and receiving), and a receiver-processor to analyze the reflected radio signal. While the technology basis of radar is straightforward, specific implementations meet the needs of various applications. This FAQ reviews how radar is implemented, including various types of automotive radar, bistatic radar, monostatic and pseudo-monostatic radar, passive radar, phased array radar, and dual-polarized radar by aeroecologists and meteorologists.
Automotive radar can be classified by function and by operating range. The International Telecommunications Union (ITU) defines two functional categories of automotive radar systems:
Category 1: Radar systems designed to provide comfort functions for the driver such as adaptive cruise control (ACC) and collision avoidance (CA) radar, with measurement ranges up to 250 meters.
Category 2: Radar for high-resolution safety-related applications such as blind-spot detection, lane-change assist, rear-traffic-crossing-alert, and identification of pedestrians and bicycles near a vehicle. The range is lower than Category 1, with a maximum of 50 to 100 meters, depending on the application.
Automotive radars are also classified based on the measurement range:
- With a range of up to 50 meters, short-range radar usually has a large field of view and high resolution.
- Mid-range radar, with a range up to 100 meters and a medium field of view.
- Long-range radar ranges up to 250 meters, with a narrow field of view and medium to low resolution.
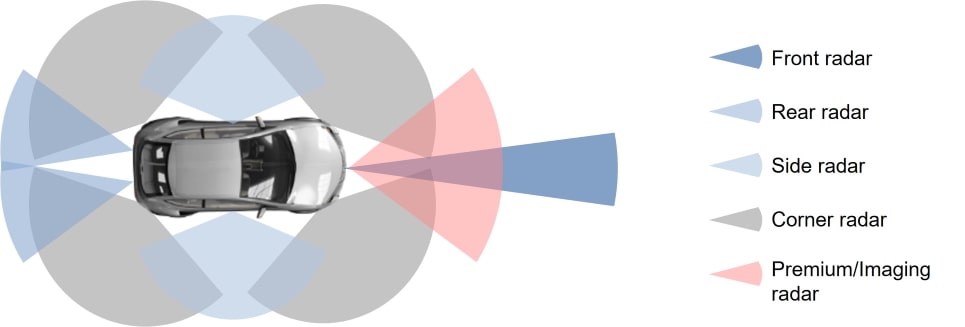
Automotive radar is further described in its function in advanced driver assistance systems (ADAS) applications (Figure 1). For example, corner radar uses four radar systems, one on each corner of the vehicle. Corner radar is used in ADAS systems such as turn assist, automated emergency braking, and vulnerable road user (pedestrian) detection. It’s considered a mid-range radar (up to 70 meters), but with a wider field of view, like a typical short-range radar.
Depending on the application, various bands of frequency modulated continuous wave (FMCW) radar are used in automotive systems. The system transmits a constant wave modulated over a specific period giving the transmitted signal a type of ‘time stamp.’ Many FMCW radars use the Doppler effect to determine the relative rate of movement of the target in addition to its range. 3D or 2D positions of the target can be determined if several channels using spatially distributed antennas are included.
Monostatic, Bistatic and Multistatic
In a conventional monostatic radar system, the transmitter and receiver are collocated. In a bistatic radar, the transmitter and receiver are separated by a distance similar to the expected target distance (Figure 2). A system that includes multiple spatially distributed monostatic or bistatic radar elements covering a common area is called multistatic radar.
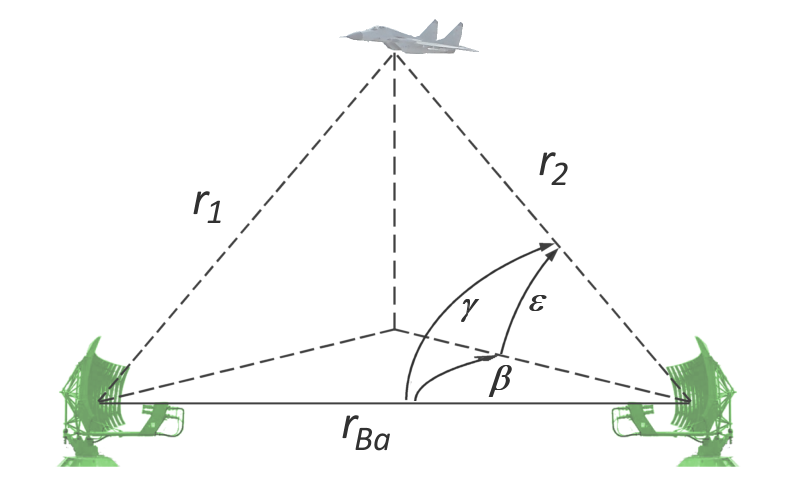
The bistatic angle is the angle subtended between the transmitter, the target, and the receiver in a bistatic radar. The size of the bistatic angle can be used to classify radar systems:
- When the bistatic angle is zero, the system is a monostatic radar, collating the transmitter and receiver.
- The system is a pseudo-monostatic radar when the bistatic angle is very small but not zero. For example, in some pseudo-monostatic radar systems, the transmitter and receiver are separated by tens of kilometers for electrical isolation, but the expected target range is over 1,000 kilometers.
- The system is a forward scatter radar when the bistatic angle is almost 180 degrees. The various radar elements are configured in a fence-like configuration to detect targets passing between transmitters and receivers. Forward scatter radar can detect stealth aircraft since the radar cross-section is determined only by the aircraft’s silhouette seen by the transmitter and is not affected by stealth coatings or shapes. Forward scatter radar is difficult to implement since the measurements of range, bearing, and the Doppler effect are very small, and tend toward zero, regardless of the target’s location in the ‘fence.’
- In all other cases, the system is called bistatic radar.
Semi-Active and Passive
Semi-active radar is a form of bistatic radar used in long-range missile systems. In a semi-active radar, the missile acts as a passive detector of a radar signal originating from an external source.
Passive radar is a form of bistatic or multistatic radar that relies on non-radar transmitters of opportunity. The system measures the time difference between the arrival of the signal coming directly from the transmitter and the reflected signal from the target to determine the bistatic range of the target. Passive radars can also measure the bistatic Doppler shift of the reflected signal and its arrival direction, which can be used to calculate the target’s location, direction, and speed. Some passive radars use multiple transmitters or receivers to make independent measurements and significantly improve the accuracy of the tracking estimates.
Phased Array Radar
Phased array radar uses a computer-controlled array of electronically scanned antennas to create a radar beam that can be steered in specific directions without physically moving the antennas. Developed for defense systems, phased array radars are used today in ADAS systems, satellite communications, and other applications to support autonomous driving, weather tracking, air traffic control, and communications.
Antenna technology that supports small, lightweight and low-cost arrays is critical in expanding phase array technology into non-military applications. A phased array radar can employ advanced waveforms and beamforming to perform various functions. In the case of naval vessels, one phased array radar system can be used for surface detection and tracking, air detection and tracking of aircraft and missiles, and missile uplink in a semi-active radar architecture. And a single phased array radar can handle hundreds of these functions simultaneously. Before using naval phased array radars, each function required a dedicated radar system. Large ground-based phased array radars are used to spot the launch of intercontinental ballistic missiles thousands of miles away and can identify and track hundreds of targets at once (Figure 3).

Radar for weather and birds
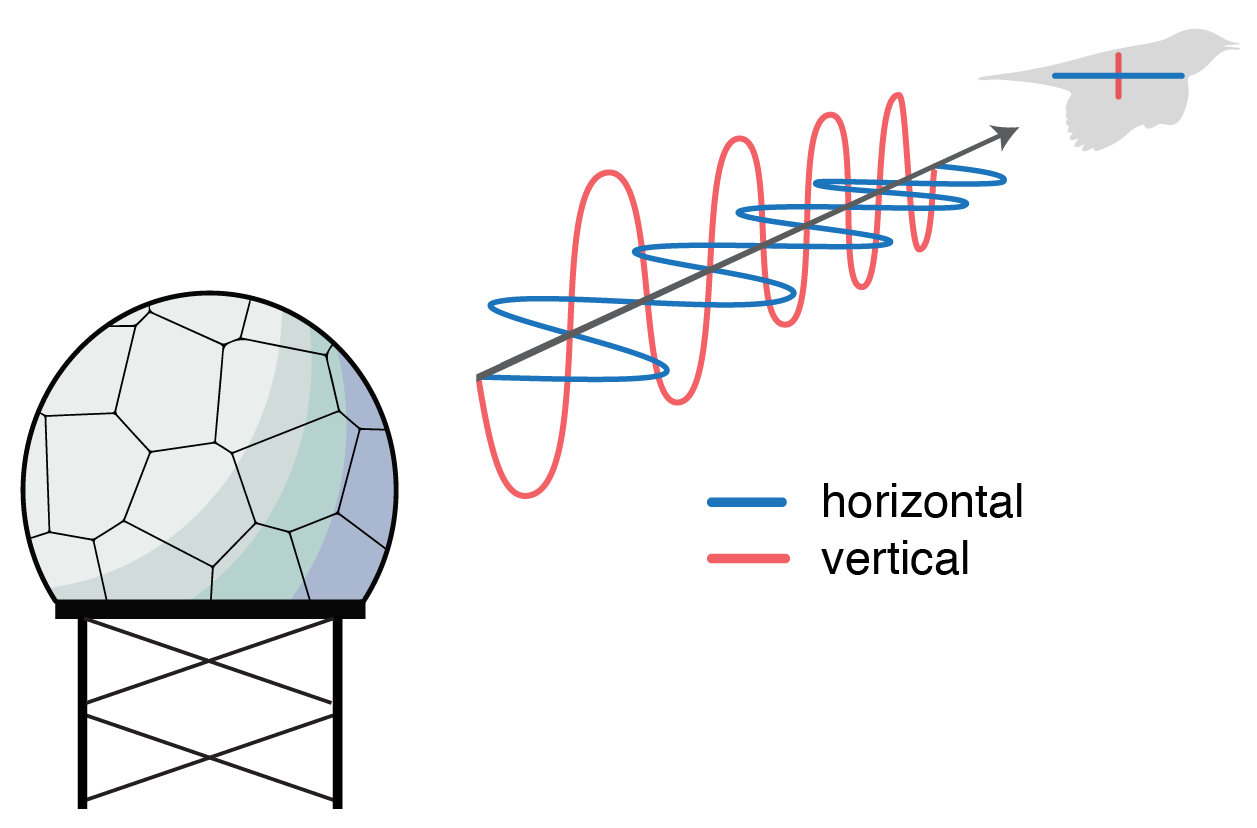
Dual-polarized radars emit signals along two planes of polarization enabling these systems to determine the approximate size, shape, and variety of objects within the atmosphere. When the WSR-88D dual-polarized radar system used by the weather service transmits pulses of radio waves, the system keeps track of the phase of each pulse. The system uses the Doppler effect to measure the direction and speed of a target’s movement. The WSR-88D radars have an average transmitted power of about 450kW. Each pulse is 1.57 x 10-6 long with a 998.43 x 10-6 listening period between pulses. For an hour, the cumulative transmission time is only about 7 seconds, with the listening phase lasting about 59 minutes and 53 seconds.
In addition, the WSR-88D automatically raises the scanning angle higher and higher as it rotates. The scanning pattern and speed vary depending on the weather. In precipitation mode, the WSR-88D completes a complete set of sweeps every 4 to 6 minutes, producing a three-dimensional picture of the atmosphere around the radar site.
A new function enabled by dual-polarization is the calculation of the ‘correlation coefficient’ that measures the degree to which the vertical and horizontal polarizations vary synchronously over time. Meteorological phenomena have large correlation coefficients. For example, the correlation coefficient of rain clouds is close to one. Flying birds have lower correlation coefficients. Movements of raindrops tend to be relatively simple. Movements of flying birds are more complex, flapping wings versus coasting, and birds have a wider range of sizes than raindrops in a cloud.
Aeroecologists use the low radar correlation coefficients of birds to filter out weather-related data and estimate the number of birds in a flight using the strength of the radar return signal (Figure 4). Radar signal strength is measured by the reflectivity factor (Z) on a logarithmic scale (dB Z). The higher the dB Z, the higher the bird density. But a high dB Z does not readily correlate to the number of birds.
Several small birds can have the same dB Z as a single large bird, and it’s not uncommon for multiple species and different sizes of migratory birds to be flying through an area simultaneously. To estimate the number of birds, aeroecologists use an assumed average bird size. The assumed average size is based on ground-based observers’ visual sightings of bird migrations in real-time.
Summary
Radar is a highly versatile technology implemented in a range of active and passive architectures. Originally developed for military uses, radar is currently deployed in various applications, including multiple types of automotive radars, air traffic control systems, communications, and tracking the weather and migrating birds.
References
Bistatic radar, Wikipedia
Doppler radar, Wikipedia
How do radar ornithologists remove weather systems from clouds of birds?, BirdCast
Radar transceivers: a key component for ADAS & Autonomous Driving, Renesas
Filed Under: Sensor Tips