by Miles Budimir, Senior Editor
Advances in hardware and software, from new processing paradigms to design and simulation, are changing the robotics landscape.
Robots these days come in many shapes and sizes. Tough but nimble industrial robots on manufacturing lines do the heavy lifting that teams of human workers used to do decades ago. Other robots maneuver through the depths of the ocean. Some robots are more like flying robotic insects, spiders, and drones used in military applications where humans prefer not to tread. And for the homeowner, robots handle the lawn mowing and vacuuming.
As far ranging and diverse as these applications are, there are some fundamental design features that they all share. Every robot in some way, shape or form consists of, at the very least, actuating components (actuators, motors) and a controller, what might be called the “brains” of the robot. As these technologies continue to evolve, they shape the nature and possibility of the kinds of robots designed and built and the places and environments where robots are to be found.
Motion Control
If you’ve been to any trade shows recently, you’ve probably seen a demo at a company booth that displays an amazing amount of multi-axis motion coordination. Usually multiple axes spinning at high speeds intertwining and or passing over or through other axes. Such displays are impressive. And what makes them possible or what drives them mostly is the processing ability of today’s controllers.
Robotics is largely about motion control, i.e. computing and processing large amounts of data and coordinating and executing moves in real time and space. In order to achieve high levels of performance, what’s needed is processing horsepower. And this is where parallel processing comes into the picture.
Kirk Barker, Electronics Product Manager with maxon Precision Motors, points out that increasingly designers are taking their cue from the biological world, with scientists and engineers developing computer processors patterned on the way the human brain works; that is, the idea of parallel processing. “Think of the human brain as a computer, processing all of these parallel streams of data for motion, color, shape, depth, etc.” said Barker. The brain’s neurons fire together, but parallel in the brain.
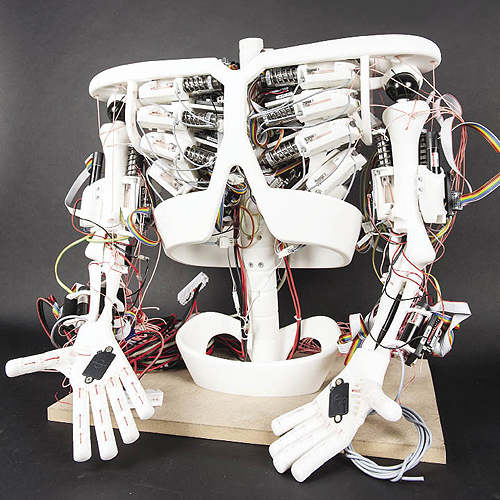
The torso of the Roboy robot developed by the Artificial Intelligence Laboratory at the University of Zurich. The entire robot uses more than 50 brushless dc motors combined with gearheads and encoders from maxon precision motors.
As such, motion control for robotics is evolving from a central CPU to either “cloud” based systems or putting more intelligence at each site, that is, in individual autonomous robots. This is the essence of so-called “cloud robotics” which is an approach that seeks to take advantage of the Internet as a resource for massively parallel computation and sharing of vast data resources.
Andy Chang, from National Instruments, sees some of the same trends in robotics. The rise in autonomous robots requires that individual robots have more individual intelligence. This is evident in that many sectors such as academia, military, and industry are focusing on the hardware side, pursuing investigations in dual processing using ARM processors, GPUs, and FPGAs. The aim is to attain smaller microprocessors that use less power. But as systems become more distributed and autonomous, power consumption is key.

The HullBUG is a robotic crawler that navigates the underwater portion of a ship to remove accumulated layers of biofilm.
Another parallel trend is that robots are getting smaller, reflecting the growing number of biomimetics applications where researchers are learning from nature how to replicate animal and insect behaviors in machines and robots. Probably the most dramatic example of this is the so-called cheetah robot developed by Boston Dynamics. (To see a video of the cheetah robot in action, check out http://www.bostondynamics.com/robot_cheetah.html).
Nanowires
One way to handle the challenge of power consumption may be to look to developments in nanowire technology. Researchers are investigating growing nanowires on graphene material, which could enable a new generation of high-speed transistors which could form the basis for powerful new microprocessors. Currently, with the trend of faster processors continuing, that is, packing more and more transistors onto processors, the limitations posed by physics are making it necessary to search for new ways to handle the ever-smaller geometries of next-generation processors. Hence, the focus on nanowires and graphene, with its atom-wide thickness which could minimize resistance and solve the challenges of heat dissipation.
Compliance
Another issue is compliance. This deals with the mechanical side of robotics, the physics of moving mass, a stiff, rigid mechanical robot, and how to achieve smooth motion that is fast and accurate. One solution that maxon is implementing in their controllers is to use force feedback, said maxon’s Barker.
This is related to another trend which is to make robots smaller and more lightweight. One way to achieve this is to reduce the number of components. In the case of motors, there may be incremental improvement but for the most part, motors are motors and haven’t changed that much over the years. However, using software methods to, for instance, measure the current in the motor and therefore be able to predict the position or angle of a robot arm can eliminate the need for an encoder, thereby reducing weight and space.
Programming/Software
Apart from hardware and processor developments are issues involving software and programming. Specifically, the importance of simulation software programs for the design and implementation of robotics in real-world applications.
National Instruments’ LabVIEW graphical programming environment lends itself to robotics applications. LabVIEW has helped designers develop a host of robotic applications from small autonomous robots that students design quickly and can prototype and test to larger industrial robots as well as autonomous vehicles.
From the software side, there is strong incentive to stop reinventing the wheel, says NI’s Chang. This is based on the higher level, software perspective, because people in robotics for several decades have become accustomed to creating from scratch, not re-using existing software or code.

Zeno, created by Hanson RoboKind and using an NI Single-Board RIO device and LabVIEW, helps diagnose and treat children with autism.
This is also reflected in another trend, with increased focus on improving robotic cognitive capabilities for better, smarter AI systems. As Chang says, “when we went to school, we spent a lot of time developing low-level drivers, not so much in intelligence.” This, too, is changing. So by making software and embedded hardware easier to use it makes robotics more accessible to more people, opening it up for more people to participate.
Another big piece of the puzzle is simulation. And together with this, having an easy-to-use software environment that encompasses the entire design process from start to finish. Robotics involves many different disciplines and languages, so an environment like LabVIEW can function as the common glue that allows groups and teams to work together.
There is a strong need for intelligent software and plugs for algorithms and IP, spanning the process from design to implementation. One way is to start with a CAD model where designers can bring a CAD model into an environment for simulation. Then, users can take the code and deploy it into a real system.
New Robotics Consortium
The REM-C (the Roboticists, Engineers and Manufacturers Consortium) is a newly founded consortium for the robotics industry. The web site features a range of resources including new product news, events, technical resources such as articles, white papers and videos, as well as information for those interested in joining the consortium.
National Instruments
www.ni.com/robotics
maxon precision motors, inc.
www.maxonmotorusa.com
REM-C (Roboticists, Engineers and Manufacturers Consortium)
http://rem-c.org/
Boston Dynamics
http://www.bostondynamics.com
Filed Under: The Robot Report, Motion control • motor controls, Mechatronics




I want to know how to build robot, in my house.