The idea of bio-inspired robots helping humans in danger is far from new. Rather incredibly, the idea actually predates the 20th century in literature, and we see it in movies as early as 1927. As is the case with most science fiction though, the reality of the technology is playing catch-up. Tracked robots have been the go-to for most rescue robot designs for quite some time. But the obvious mobility problem over rough terrain has been an ongoing issue.
The Hydraulically actuated Quadruped
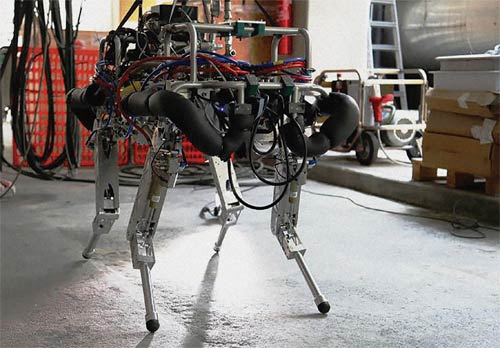
That’s why researchers from the Genova, Italy-based Istituto Italiano di Tecnologia (IIT) created their Hydraulically actuated Quadruped (HyQ) to help humans in emergency situations and search and rescue operations. A predictable design concern was going hydraulic or electric.
“We chose the hydraulic solution for HyQ over the electric one, as it guarantees us higher performance and power, strength and improved control of the legs,” said Claudio Semini, project leader engineer of the Advanced Robotics Dept. of the IIT.
IIT selected a miniature servo valve from Moog Industrial Group, a part of Moog Inc., to control the legs of a new quadruped robot.
“The project, started in 2007, represents an important innovation in the field of bio-inspired robotics and has the ambitious goal of creating a highly versatile robot, capable of moving around on its four legs with agility, even over rough terrains, overcoming the obvious limitations of tracked robots being used up to now,” he added.
The design of the “actively compliant” legs was a key element in the development of HyQ. The miniature valve allowed for the rapid modification of the hydraulic flow to the moving parts, enabling modulation of the rigidity/elasticity of the limbs and absorbing impact shock. Moog’s Miniature Valves (E024-LA) gave researchers compact-sized hydraulic servo valves with the performance and strength they needed. The E024 series was originally developed for use on F1 automobiles and in motorsport applications because of its high power density and lightweight design, weighing just 92 g (3.24 oz).
HyQ can jump or walk on a rocky trail or along a corridor with V-shaped slanted sides, run at different speeds (up to 2 m/sec [6.56 ft/sec]) and adjust its speed in response to different environments. The installation of a perception system and an inertial measurement unit (IMU), allow the robot to plan its own movements based on a map of the surrounding environment. HyQ can also correct its steps, in real time, while always maintaining its predetermined posture. HyQ is also one of the few robots capable of doing the “flying trot,” where all four legs lift off the ground (see the video in the digital version of this story).
The power of the hydraulic solution is not without its limitations though; there is still work to be done on HyQ.

The Moog E024-LA is most commonly used for motorsport applications where high levels of power density are required that cannot be achieved with electrical actuation. This makes it a perfect fit for the HyQ.
“We are very proud of the enormous progress we have made, but our work is not finished yet. HyQ currently is almost 1 m long (3.28 ft) and weighs about 80 kg (17.63 lb), and we are still working on the power source system, currently managed through an external unit, in an effort to mount it directly on board, even though it will increase the weight. We are trying to set up new partnerships with companies, like Moog, that are capable of meeting our needs for components that are smaller and lighter, yet high performance,” Semini said.
Moog Inc.
www.moog.com
Filed Under: Hydraulic equipment + components, The Robot Report, MOTION CONTROL, MORE INDUSTRIES




Tell Us What You Think!