by Ellen Rathburn, Technical Copywriter, igus Inc.
Managing the six-axis platform in robotics requires special consideration when designing cabling systems.
In the field of multi-axis robots, industrial integrators are faced with the unique challenge of selecting and managing cables to be run on the outside of a moving six-axis platform. The complex movements made by six-axis robots require special consideration when deciding how to manage their cable systems. “There are many unsuitable ways to accomplish this, from corrugated tubing used in static wiring, to on the fly fixes such as duct tape and bungee cords,” Don Nester, Product Manager for Chainflex Continuous flex cable at igus explained.

Traditional cable management systems attempt to keep cables static, while operations surrounding them are dynamic. Restricting the movement of the cables can create points of stress, accelerating cable failure. Today, new intricate movements carried out by robots, especially the sixth-axis rotation, have created a need for a more modern way of thinking about cable selection and management.
One of the major problems with robotic cable management, according to Nester, is that it is often the last thing to be thought of in the design process. “These are complicated movements with multiple profiles,” he said. “You’re not just dealing with an X-Y axis, you’re dealing with twisting, turning, and a lot of points on a robot that you cannot mount to but need to keep controlled. The length of cable needed for each movement profile is different; this requires a cable management system that allows the cable length to change without rerouting.”
These articulated machines can be used in a wider variety of applications due to their increased range of motion, but the aspect that renders the machines more flexible in function is the very thing that most affects the cabling system.
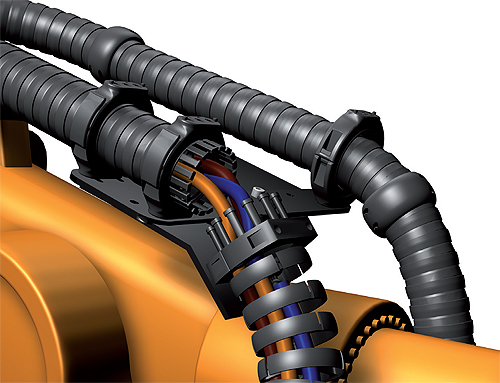
While current systems use a more restrictive cable package that will run cables from the robot case to the end effector, igus engineers are urging designers to consider a new, dynamic approach: treat a six-axis robot as three separate segments: the sixth to third axis, the third to second axis, and the second to first axis. Segmenting the dress pack into three shorter sections prevents it from wrapping, catching, or snagging on machines, and minimizes stress on cables and hoses. This breakdown of segments is imperative to having maximum cable control while allowing cables to function properly for their manufacturer-determined service life.
Ideally, each segment should feature a minimal dress-pack, strain relief with service loops, and a junction box that contains and protects electrical connectors joining the cables. Strain relief cables specially designed to handle torsional movement are crucial to avoid cable failure and keep machines up and running for as long as possible.

Tested in the igus labs in Cologne, Germany, Chainflex CF-Robot cables and TriflexR cable carriers have been proven to reliably work in six-axis robotic applications. The test is conducted with a fixed point of 3.2 ft (1 m) and torsion of ±180º for a minimum of 3 million cycles. A second test is conducted at 8.2 ft (2.5 m) with a ±270º torsion field. These tests duplicate the force imparted in cables installed in the field. Combined, the CF-Robot cables and TriflexR cable carriers create a system that will perform throughout the life of the robot.
Moving robots call for moving cables
Conventional cables are not designed to take on the repeated torsional movement these types of robots execute. “A cable designed for linear movement will not be the best option for torsional movements. Robotic applications requiring torsion of more than ±180º will demand a cable designed specifically for torsion,” Nester explained. In order to make a cable that can stand up to this type of torsional strain, certain things must be incorporated into the cable’s design:
∞ Special conductor stranding and pitch length should be used.
∞ The insulated conductors should be twisted in a way that allows for torsional movement of the internal parts of the cable. To do this, special buffering materials are used to keep the components moving freely within the cable.
∞ Special shield designs are also required to prolong the shield’s effectiveness and mechanical life of the shield material, whether it is braided or single serve.
∞ Use special jacket materials that have been proven to be abrasion resistant and pliable enough for the twisting movements required.
Cable management
Though robotic cables have been designed to withstand the unique strains a six-axis robot can put on them, a cable management system is crucial to ensuring these cables work at their potential for as long as possible. When improperly housed, cables will wear prematurely or fail in other ways, causing downtime and a delay in production. Unhoused, cables can sag and fall into the work area, or become tangled within the moving parts of the machinery. Leading system integrators cited cable issues as the number one reason for downtime in robotic cells at a conference held by the Robotic Industries Association. Often overlooked, housing the cable bundle properly around a robot is critical in maintaining proper performance and avoiding machinery downtime.
In these robotic systems, cables run along the robot from the base to the end effector, with the robot divided into six axes. As reported by Nester and his colleagues at igus, the most challenging movement robotic cables and management systems have to endure is at the sixth axis, at the end of the robotic wrist. These sometimes move significantly, more than 180°, creating problems in managing the cables. Corrugated, flexible tubing is one of the options for cable management used in these robots, but it has its limitations, mainly limited torsion resistance and ability to stretch along with the robot’s movements. These failings cause strain on the cables, leading to downtime.
A second option is enclosed dress packs, mounted directly on the robot. This method is comprised of corrugated tubing housed in reinforced plastic. This adds strength, but its non-modular design makes cable maintenance difficult and requires the replacement of the entire system if one component were to break.
Consider a new approach to six-axis robotic cable management by separating the dress pack into three separate segments.
A third option for cable management is a robotic cable carrier, which is mounted directly to the robot and can be tailored to the customer’s exact specifications. Similar to an enclosed dress pack, the spring-loaded design is equipped with strain relief options, extending the service life of the cables, as well as the ability to quickly add or remove cables without dismantling the entire system, allowing for minimal downtime. Most importantly, the defined bend radius of these systems ensures that cables are protected from exceeding their maximum bend radii.

A cable designed for linear movement will not be the best option for torsional movements. Robotic applications requiring torsion of more than ±180º demand a cable specifically designed for torsion, such as igus’ own Chainflex CF-Robot line of robotic cables.
Tested systems that integrate seamlessly
One option for robotic cable carriers is igus’ Triflex R, a modular, multi-axis cable carrier system designed to guide and protect cables and hoses in robotic applications. Triflex R ships and installs as one piece and features an integrated fiber rod that returns cables to a home position after the robot completes a cycle. The system includes mounting plates and brackets, protection links, and a pre-engineered fiber-rod assembly. It is a modular, compact system, but with only one piece to install for complete end-of-arm tooling guidance. The lightweight plastic 3D robotic cable management system is made up of one-piece links that require no additional items such as steel cables or spring mechanisms for support. Triflex R is highly flexible due to its ball-and-socket design, enabling movements in all axes. Its small bending radii and short pitch make it an ideal space saving installation. The modular design also simplifies maintenance; individual links can be replaced as needed, reducing costs; and cables are easily accessed, saving time.
Made up of injection-molded components, Triflex R requires minimal assembly effort; the links simply snap together. Specially designed mounting brackets allow the system to attach to the machine easily, whether needed at the ends of the cable system, or in between.
According to Don Nester, robotic cable carriers like Triflex R offer one distinct advantage over other methods: their movement. “[It’s] twisting the assembly, [It’s] twisting the whole cable bundle when the sixth axis rotates, allowing the cables to be twisted without kinking,” he clarified. “Other solutions in the market, such as the tube-style solutions, aren’t capable of that type of rotation.”
Making the change from corrugated tubing or unprotected cables to a 3-dimensional robotic cable carrier may seem like an unnecessary and complicated task, but experts in the field agree that proper cables and cable management can make or break a robotic system. While the initial savings may sway a potential customer away from purchasing robotic cables and a suitable carrier, costly repairs and loss of productivity from unplanned machine downtime could convince even the most tentative of engineers and designers. These new, specifically designed systems can make maintaining six-axis robots a much simpler task. “It’s a system that reduces maintenance,” Nester finalized. “It’s easy to install, simple to maintain, and it works.”
igus Inc.
www.igus.com
Filed Under: Factory automation, Cables + cable management, The Robot Report, Mechatronics




Tell Us What You Think!