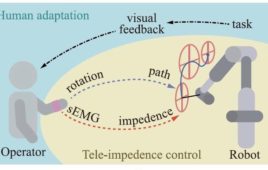
Using surface electromyograms, or human muscle signals, researchers at the Korea Institute of Science and Technology were able to get a robot to trap a ball like a soccer player. KIST’s team did this without numerical calculation or programming.
Continue to Site