Linear motors can achieve high acceleration rates and long travel lengths with good thrust forces and extremely high positioning accuracies, while other drive mechanisms, such as belts, screws, or rack and pinions, must sacrifice at least one of these requirements in order to achieve the others. This is why linear motors are the preferred choice for highly dynamic applications such as metrology and semiconductor manufacturing.

In fact, based on their performance specifications, linear motors seem to be the perfect solution to address the competing requirements often found in linear motion applications. But that brings up the question, “Why aren’t linear motors more widely adopted?”
To understand why linear motors still lag behind other drive technologies — such as belts, screws, or rack and pinion drives — let’s look at some of the benefits and drawbacks of linear motor designs.
Heat generation and dissipation
When sizing and selecting a motor — whether rotary or linear —one of the primary considerations is heat. In fact, torque (or force) versus speed curves, which depict continuous and intermittent operating ranges for a given motor-drive combination, are based on the motor’s ability to dissipate heat under specified operating conditions.
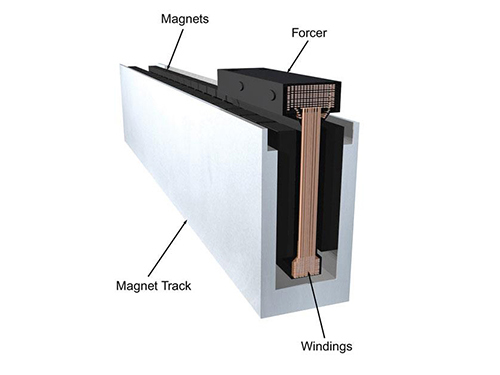
Image credit: Aerotech
Heat generation can be even more problematic for linear motors than it is for rotary motors, since the load is mounted to the forcer, which contains the motor windings. (In some linear motor designs, the load can be mounted to the magnet track, although this may only be feasible for short strokes.) And in ironless linear motors, the windings are encapsulated in epoxy, which doesn’t dissipate heat as readily as metals such as iron or aluminum.
This means that heat is easily transferred to the load and the surrounding components, causing thermal expansion, degradation, or, in extreme cases, damage or failure. Even if the load is unaffected, the build-up of heat can reduce the motor’s continuous force output. To combat this, some applications require forced air or liquid cooling, which increases cost, footprint, and complexity.
Protection from contamination
Due to their open design and exposed magnets, flat, iron core linear motors and U-channel ironless designs can be difficult to protect from contamination. While the supporting linear guides can be protected with various off-the-shelf seals and scrapers, the exposed magnets of a linear motor can attract ferrous particles from machining operations or simply from airborne contamination often found in manufacturing and factory environments. And liquid contamination can damage sensitive electronics or interfere with feedback systems.
Of course, covers and external structures can be designed to protect against contamination, but they can make it more difficult for the motor to dissipate heat, exacerbating the heat-related problems described above.

Image credit: Chieftek Precision
Compensating for vibration and oscillations
One of the key selling points of a linear motor solution is that it eliminates the need for mechanical power transmission components —such as screws, belts, gearboxes, and couplings — between the motor and the load. This means that linear motors don’t suffer from the effects of backlash, windup, and compliance, which is a major factor in their ability to achieve very high positioning accuracies and execute highly dynamic moves, with quick acceleration and deceleration rates.
But mechanical transmission components can be beneficial in a motion system by providing a damping mechanism for oscillations and attenuating disturbances, such as reactions from machining forces or vibrations induced by the movement of the load. And without this “built-in” damping effect, oscillations and vibrations can prevent linear motors from achieving the desired positioning accuracy or settling time.
To ensure the system can react to, and make corrections for, the effects of these undamped vibrations and oscillations, linear motor systems often require higher frequency velocity, position, and current (force) control loops, and a higher current loop bandwidth. The position feedback system — typically an optical or magnetic linear encoder — also needs to have a higher resolution so the controller can more accurately track the position of the motor and load. Even the machine frame or supporting structure must be made stiff enough (with a high natural frequency) to remain relatively insentive to shocks and vibrations and withstand the forces generated by the linear motor.

To achieve the positioning accuracies that linear motors are capable of, the control system needs a high bandwidth current loop, high-frequency control loops, and high resolution feedback.
Image credit: Beckhoff
In other words, because there are fewer components to help compensate for vibrations and disturbances, the feedback and control loops must be able to communicate faster and more accurately for the system to achieve dynamic, high-accuracy performance.
Upfront cost versus total cost of ownership
And finally, one of the key limiting factors to the widespread adoption of linear motors continues to be the upfront cost. Although comparisons abound that demonstrate the lower total-cost-of ownership (TCO) of linear motor solutions over traditional belt, screw, or rack and pinion solutions in some applications, the up-front cost of a linear motor system is still a barrier to adoption for engineers and designers who are tasked with meeting performance specifications within a constrained budget. Case in point: For applications with very long travel lengths – one of the areas where linear motor solutions excel – the cost of magnets and high-resolution linear encoders to meet the travel requirements can price a linear motor solution out of consideration.
Non-traditional applications drive growth in linear motor adoption rates
Despite the potential difficulties posed by heat generation, protection from contamination, high-bandwidth controls, and cost, the adoption rate of linear motors is growing. Once seen as niche solutions for semiconductor, metrology, and heavy-duty machining applications, iron core, ironless, and tubular linear motors are now used in automotive, food and packaging, and printing applications, where the moves may not be as challenging or the accuracy requirements as demanding, but where the benefits of fewer components, less downtime, and higher throughput justify the additional cost and design considerations.
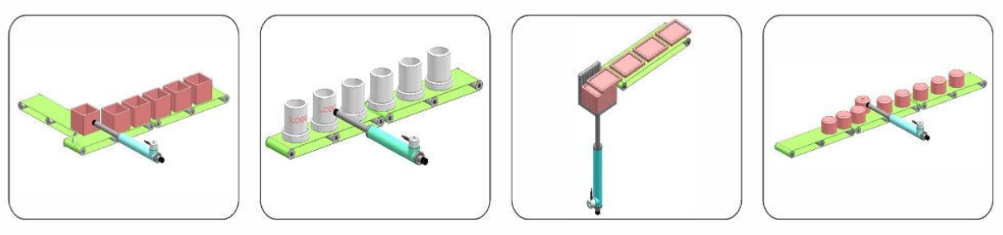
Image credit: Kunlin Technologies
Filed Under: Linear Motion Tips