by Terry Persun/ Technology Journalist
The Monterey Bay Aquarium Research Institute (MBARI) developed the Tethys long-range autonomous underwater vehicle (LRAUV) as a tool for ocean scientists. The range and endurance of the Tethys expands the types of observations and experiments that are possible with autonomous platforms.
According to Brian Kieft, Software Engineer at the MBARI, “The Tethys LRAUV was designed to fill the gap between the large propeller-driven AUV models presently used, and the long endurance, low-payload buoyancy-driven systems.” The system, which incorporates EZSV23 All Motion controllers, operates for as long as a month in order to explore and map both chemical and biological features in the upper 300 meters of the ocean.

The All Motion EZSV23 controller is housed in a titanium pressure housing for protection while operating inside the Tethys Long Range Underwater Autonomous Vehicle as it operates under water or bouncing over the surface.
A suite of installed sensors will travel inside the Tethys ten times farther than possible with present long endurance models. This expands researchers’ non-ship observational capabilities beyond the upwelling shadow and well into the oligotrophic (nutrient poor) ocean. For example, with this technology, scientists will be able to study phytoplankton blooms for an entire cycle, from bloom-to-bust, by providing a mobile platform that can survey the bloom during its two-week to month-long lifetime.
An important design goal was to allow the Tethys to control its pitch and yaw using active control surfaces. Brian and his team also wanted to control pitch by shifting the internal battery mass fore and aft inside the pressure hull. A variable ballast system allows Tethys to actively adjust its buoyancy, while a high-efficiency propeller drive system operates in ranges of more than 1800 kilometers, while traveling at speeds of up to two knots.

Each Tethys LRUAV is made from incompressible foam, which offers buoyancy so that the device doesn’t sink into the soft sea floor. The material also allows the unit to glide through the upper water column easily, hence using less electricity while it’s on a mission.
Extensive design efforts went into minimizing the propulsion power requirements for the unit, which is about 12 in. in diameter, 7.5 ft long, and weighs about 265 lb. Strategies included reducing drag through the development of a low-drag after-body, minimizing appendages, and developing control procedures to minimize induced drag. A custom propeller design and gearless propulsion motor optimized for efficient low-speed operations helped in these efforts. Of course, this unique design required a custom build.
The Tethys unit has five actuators used to shift the battery mass, pump oil for buoyancy control, actuate the rudder and elevator, and operate the propeller motor. All five of these operations are controlled using All Motion’s EZSV23 EZ Servo Motor Controllers. A key feature of these controllers is the flexibility to accommodate different styles of motor control, including analog position feedback, encoder feedback, hall sensor velocity feedback, and homing. “We were also able to integrate one component for several different control systems early in the design process,” Brian said, “so the design team was able to move forward and focus on the custom portions of the overall mechanical design.
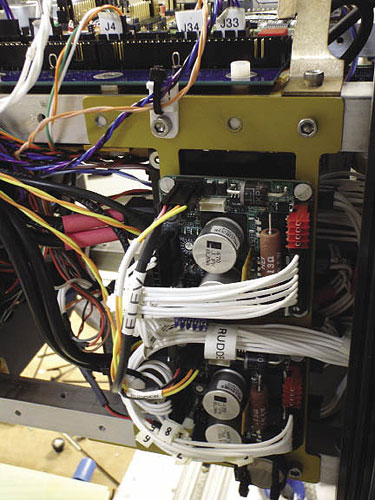
The All Motion EZSV23 Controller provides intelligent control of the five critical subsystems inside the Tethys underwater autonomous vehicle to make it useful for a variety of long-term scientific studies. Shown are the rudder and elevator controllers. The thruster and buoyancy pump controls are located on the opposite side. The fifth controller is in the front of the system.
The controller manages brushed or brushless dc motor systems in automation products within a short design cycle. These compact intelligent controllers measure 2.25-in.2; operate from 12-40 V through RS232, RS485, or USB-based communications; and were easy to integrate for the Tethys project.
A single, 4-wire bus links with up to sixteen 5-amp motors in a daisy chain format. Because commands can be delivered from any serial terminal program or from the EZServo/Stepper Windows application, you can make a brushless dc servo motor move intelligently in less than half an hour. Plus, the device is capable of stand-alone operation, and can be set up to execute a preset string of commands upon power-up.
Between the five subsystems, the LRAUV exercises nearly every available operating mode provided by the controllers except for slaving. When this amount of control is coupled with power control (the EZ Servos are powered down when not actively controlling a motor) it highlighted additional areas the engineering team could explore, such as commanding a negative encoder value without changing position immediately following a power cycle.
The devices are highly reliable and can handle the often-turbulent environment that the Tethys runs into on the ocean surface.
All Motion
www.allmotion.com
Filed Under: Motors • servo




Tell Us What You Think!