The Global Positioning System (GPS) evolved from earlier relatively primitive systems that were originally developed primarily for military uses. Before long these systems became available worldwide for civilians but at reduced resolution. Then in 1996 President Bill Clinton signed a document that had the effect of ending selective availability. Today GPS at maximum resolution can be accessed by everyone free of charge. It is used by scientists, astronomers, surveyors, motorists, aircraft and naval navigators and anyone desiring to know the precise location of the GPS receiver. It can locate stolen cars and lead lost hikers back to civilization.
GPS is a accurate, reliable system that may be thought of as an integration of three segments:
• Space Segment (SS) consists of 32 satellites orbiting the earth at an altitude of 12,600 miles above the surface. Because this distance is one-half the altitude of geostationary satellites, GPS satellites orbit earth twice each day. The orbits do not lie in the same plane and they are not situated over the equator like geo-stationary satellites. Approximately nine satellites are visible from any point on earth at a given time, so even with downtime for maintenance and adjustment, there are always more than the four overhead necessary for accurate global positioning.
• Control Segment (CS) consists of master, control and monitoring stations and four ground antennas.
• User Segment (US) consists of millions of military and civilian ground-based receivers. These can take various forms such as units that are integrated into go-to astronomical telescope mounts and automobiles, or portable units that hikers can carry. Early receivers were bulky and weighed over fifty pounds, but now a typical module, not including battery and display, is one-quarter the size of a book of matches.
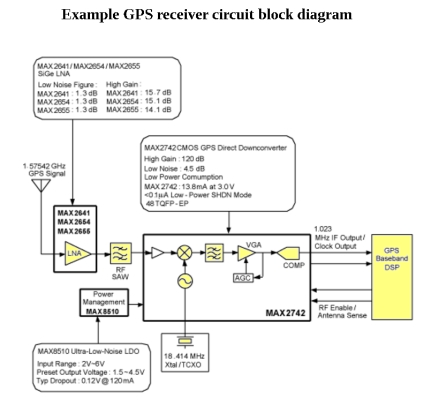
One example of a GPS receiver circuit is this one, built around a GPS front-end downconverter chip from Maxim Integrated Products, Inc. The CMOS MAX2742 works with a GPS baseband IC. The complete receiver would include an antenna supply-control block, a RESET circuit, and a delay circuit.
All GPS satellites broadcast at the same frequencies. The signal, a modulated carrier wave, consists of the exact time and position of the satellite. The transmitted signal includes a pseudorandom code (sequence of ones and zeros) known to the receiver. By time-aligning a receiver-generated version and the receiver-measured version of the code, the time of arrival (TOA) of a defined point in the code sequence, called an epoch, can be determined in the receiver clock time scale.
The satellite carrier signal also includes the time of transmission (TOT) of the code epoch (in GPS system time scale) and the satellite position at that time. Conceptually, the receiver measures the TOAs (according to its own clock) of four satellite signals. From the TOAs and the TOTs, the receiver forms four time-of-flight (TOF) values, which are (given the speed of light) about equivalent to receiver-satellite range differences. The receiver then computes its three-dimensional position and clock deviation from the four TOFs.
In practice the receiver position (in three dimensional Cartesian coordinates with origin at the Earth’s center) and the offset of the receiver clock relative to the GPS time are computed simultaneously, using the navigation equations to process the TOFs.
The receiver’s Earth-centered solution location is usually converted to latitude, longitude and height relative to an ellipsoidal Earth model. The height may then be further converted to height relative to mean sea level. These coordinates may just be displayed or used by some other system such as a vehicle guidance system.
This information has an accuracy of two or three feet. In the near future it is anticipated that still greater precision will be obtained.
The post Basics of the Global Positioning System appeared first on Test & Measurement Tips.
Filed Under: Test & Measurement Tips