
The VG10 vacuum grippers don’t use external compressed air to create suction. It creates an internal air supply with self-contained airflow and has two individual vacuum channels. Source: OnRobot
Robots have used multiple types of grippers for years, but the push for more manual dexterity has become more urgent because of rising demand from e-commerce order fulfillment and other applications. Human-level manipulation of various objects is a difficult technical challenge, and robotics developers and vendors have responded with a range of solutions.
From claw, parallel, and rotary grippers to bellows, magnetic, and vacuum grippers, robotic manipulation has evolved to meet the needs of industries including automotive and electronics manufacturing and food processing.
With the rise of collaborative robot arms, or cobots, machine manipulation has diversified to handle a widening variety of objects. Industrial robots could use parallel or rotary grippers for fast, repetitive handling of identical parts, but cobot users need flexibility and safety over throughput.
In addition to consumer packaged goods, markets for robotic grippers include machine tending, pharmaceuticals, plastics, and agriculture and food processing. Even more specialized, in terms of performance requirements, are end-of-arm tools (EOATs) for undersea exploration, telesurgery, and hazardous materials handling.
 Keynotes | Speakers | Exhibitors | Register
Keynotes | Speakers | Exhibitors | Register
The makers of robotic grippers have designed their products to work with multiple models of industrial and collaborative robot arms. Advances in prosthetics have paralleled the development of electromechanical and pneumatic grippers. Better sensing and controls, lighter materials, and more efficient use of space and power continue to make grippers an area of robotics worth watching. Here are five advances to follow:
1. The right tool for the job
Robot grippers must be appropriate for the size, weight, and rigidity of the objects they handle, as well as the required precision. Shoeboxes are much easier to move than screws, a large pallet, or shrink-wrapped shirts, for example.
As with robots in general, cobot EOAT designers and users should consider the competing demands for cycle time, torque, and shape and force limitations for safety. Environmental contaminants and patterns of contact and wear are other factors to note.
Several companies, such as Destaco, offer customizable end effectors to work with specific items or materials.
Increasingly, robotics vendors are offering suites of solutions that include grippers, sensors, and software. For example, Quebec City-based Robotiq has grown not only by selling products, but also explaining the value of such combinations.
Source: Robotiq
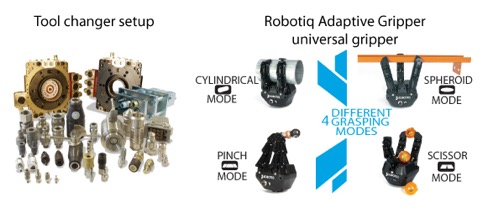
Much of the attention in the collaborative robotics space has been on developing end effectors that are as easy to install and use as the robot arms they’re mounted on. Rather than trying to use a single end effector to do everything, tool changers are designed to make it easier to quickly swap out robotic grippers.
Major vendors of “automatic manual” tool changers include ATI Industrial Automation, Applied Robotics, SAS Automation, Schunk, and Stäubli.
2. Nimbler fingers
While human-level dexterity might not be the goal of developers and suppliers — surpassing it is — new materials and types of grippers are making robots more reliable and flexible than ever.
Robotiq’s three-finger adaptive grippers are designed to minimize tool changes with a high degree of customizability, a patented mechanism for high precision, and plug-and-play kits for UR arms.
OnRobot’s RG-FT smart gripper, which debuted at last year’s IMTS, includes six-axis force and torque sensors.
The Odense, Denmark-based company’s new Gecko gripper uses biologically inspired microscopic stalks to grasp flat objects more effectively than current electrostatic methods.
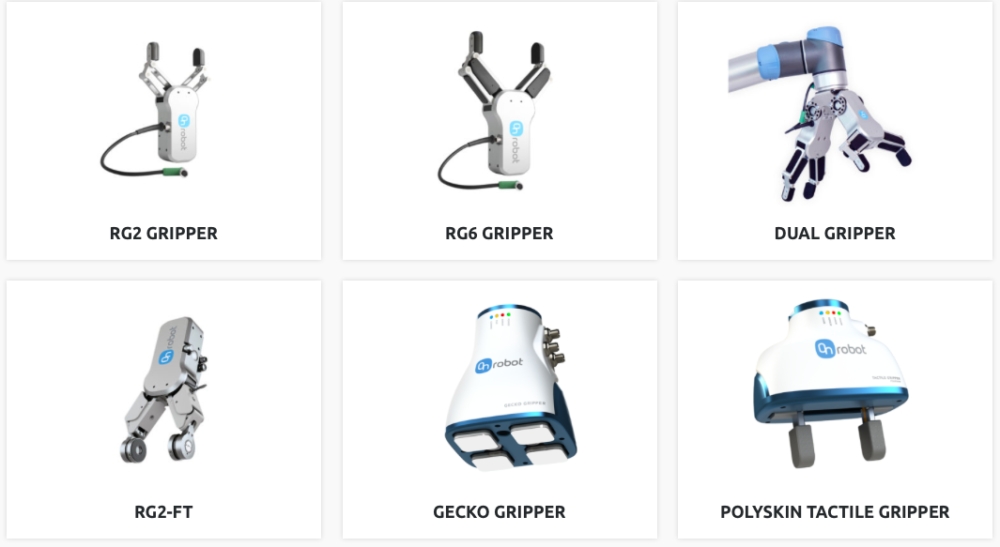
OnRobot provides a variety of robot grippers.
Not all robotic grippers use fingers or clamps. Researchers at the Rochester Institute of Technology have studied elephant trunks for grasping, and Festo has copied an octopus tentacle. In addition, Empire Robotics’ Versaball uses granular jamming in its balloon-like grippers.
OnRobot’s Polyskin Tactile Gripper is an example of robot grasping with tactile sensors. Force sensing can improve manipulation of fragile items such as eggs or lightbulbs, as well as safety in processes where robots are collaborating with humans.
3. New approaches to suction
A new generation of vacuum grippers don’t require an external air supply to create suction. This results in suction grippers that are less noisy, more energy efficient and a smaller overall footprint.
Researchers at Saarland University have developed “artificial muscles” to create suction without vacuums generated with compressed air.
The technology is based on the shape memory properties of nickel-titanium alloy, which is able to “remember” its shape and to return to that original shape after it has been deformed. By switching on and off an electrical current that flows to that muscle, it contracts to create a vacuum within the rubber membrane and relaxes to release it.
OnRobot offers a vacuum gripper that doesn’t use external compressed air with its VG10, which it acquired when it bought Purple Robotics last year. The VG10 features a payload up to 10kg (11 lb.), an internal air supply with self-contained airflow, and two individual vacuum channels that can simultaneously use different suction power and lost grip detection.
“More electrical grippers are coming out and we’ll continue to see that,” said Esben Østergaard, co-founder and CTO of Universal Robots. “Five or 10 years ago, everything was pneumatic. Now, everything is going electric.”
4. Combining approaches
In the past year, several companies have combined types of grippers for more reliable pick-and-place operations. RightHand Robotics’ RightPick has both a vacuum gripper and fingers and uses computer vision and machine learning in the cloud.

With a gripper that combines fingers and suction, RightPick achieved a pick rate of 800 to 1,000 units per hour at a DHL event. Source: RightHand Robotics
Purple Robotics, which was launched by former Universal Robotics engineers, offered dual-grip functionality with its PR10, incorporating both claw and vacuum gripper types.
Soft Robotics’ SuperPick system is controlled by AI and adds a vacuum to its compliant grippers.
Researchers at the University of California, Berkeley, recently created Dexterity Network (Dex-Net) 4.0 for “ambidextrous robot grasping policies.” In this approach, robots were trained for both parallel-jaw and vacuum gripper grasping on a library of 5 million synthetic images. With two arms and grippers, the robot could choose which one to use for a particular task.
“On a physical robot with two grippers, the Dex-Net 4.0 policy consistently clears bins of up to 25 novel objects with reliability greater than 95% at a rate of more than 300 mean picks per hour,” reported the UC Berkeley team.
OnRobot’s creation this past year from the merger of On Robot, OptoForce, and Perception Robotics illustrates a different kind of consolidation. The number of tool providers is likely to change, even as EOATs proliferate and cobot makers challenge Universal Robots for dominance.
5. Improved sensors, AI guide grippers
Among the recent developments for robotic manipulation is the addition of machine learning, fed by large data sets and connected via the Industrial Internet of Things. As with other forms of artificial intelligence, this depends on the amount of data available, whether processing for machine vision occurs at the edge or in the cloud, and the types of sensors used.
For instance, Vicarious AI is developing “artificial general intelligence for robots.” The San Francisco-based company’s “virtual cognitive computer” software uses images from cameras to instruct robot grippers on how to approach an object. In other words, the robot can teach itself through observation and comparison with existing models.

Source: Vicarious AI
Researchers at Singapore’s Agency for Science, Technology, and Research (A*STAR) Institute and Japan’s CNRS-AIST Joint Robotics Laboratory have created an algorithm that allows a robot to compare a shape with its own hand to determine how to best move an object.
On the sensor side, Waltham, Mass.-based Veo Robotics uses a suite of cameras in a work cell to add collaborative safety features to industrial robots.
NVIDIA’s Deep Object Pose Estimation System enables robots to determine the position of an object using data from a single image.

Source: Fetch Robotics
6. Mobile manipulation
Sometimes described as the “holy grail” of e-commerce automation, the combination of cobots with mobile platforms has been elusive until recently.
Fetch Robotics has been known more for its Freight autonomous mobile robots, but its Fetch mobile manipulator is available for researchers.
IAM Robotics’ Swift can pick items from shelves and place them into bins, and it can be run in fleets.
The MOVO Beta from Kinova, which makes lightweight arms, grippers, and other robotics parts, is intended as a research platform. It runs on the Robot Operating System (ROS) and includes simultaneous localization and mapping (SLAM) capabilities.
Toyota AI Ventures last year issued a “call for innovation” focusing on mobile manipulation for its planned assistive robots. It ultimately invested in Elementary Robotics.
Cobots getting a grip
Software and hardware engineers at robotics developers, vendors, and user organizations have more options than building or picking a specialized tool for each task. The increasing breadth of end-of-arm tooling, as well as more sophisticated sensors, data analysis, and connectivity, are driving a new generation of machine manipulation.
The use of EOAT in non-automotive applications increased by 20% in 2017, compared with 14% in automotive ones, according to the Robotic Industries Association.
The global collaborative robot market, which is a small but expanding portion of industrial automation, will experience a compound annual growth rate of 49.8%, predicted ABI Research. It will grow from $292 million in 2017 to $1.23 billion by 2025, said ABI. This growth will driven by small and midsize enterprises and demand for safer robots that can handle a variety of items.
Editor’s note: A version of this article first appeared in the print edition of The Robot Report with Design World.
Filed Under: AI • machine learning, The Robot Report, Robotics • robotic grippers • end effectors



Tell Us What You Think!