Automated installations feature more robots than ever. But unless it’s a custom or Cartesian setup, robot controls are traditionally segregated from those for automated motion axes. So connectivity between robot and system controller or PLC is via a network — usually based on Ethernet. Then a control system coordinates the machine functions of nearby conveyors or other workcell systems with those of the robot controller.

B&R has expanded its portfolio of modular mapp software components … so now, mapp RoboX and mapp Teach make it faster and easier than ever to get robotic systems configured and ready for operation. mapp RoboX controls any kinematic system with up to 15 axes. Developers get design freedom … yet the robot is simple to parameterize, with visualization and diagnostics already onboard. This saves time in development and during operation. For the next step there’s mapp Teach, which provides intuitive teach-in functionality to define and manage the robot’s movement sequences and quickly get it going. mapp technology consists of individually encapsulated blocks that streamline development of new applications. The components provide basic functionality with graphic configurability — cutting development times by an average of 67% … and all mapp components are connected via mapp links. Each mapp component retrieves the data it needs from other components using a client-server model.
Synchronization can be limited, and integration requires use of separate motion and robot programming — with the latter (if not code generated by teach modes and pendants) in proprietary software.
In contrast, some newer functionalities are helping engineers more tightly coordinate robot operations with motion systems — especially for common applications. These also simplify integration. Epson Robots T3 SCARAs integrate controllers in their bases that (in some versions) run conveyor-tracking software for simple setup of assembly and other automation. DENSO Robotics, Mitsubishi Electric, and Universal Robots also offer conveyor-tracking functions that leverage either sensor networks or machine vision.
Such synchronization is tight enough to allow for execution of pick-and-place, sorting, and other motion-to-robot automation tasks.
Integration of motion and robots (including SCARAs and parallel robots such as delta robots and hexapods) is also possible through unified or unifying software and hardware. That includes robot programming for converting to and from coordinate reference frames more commonly used by motion design engineers. Case in point: Galil motion controllers with an onboard Coordinate Transformation function execute code to control robots without the latencies of other options. Design engineers work with an application engineer to define reverse and forward transformations; then equations are written into the controller’s firmware for quick execution. Beckhoff TwinCAT Kinematic Transformation software also allows programming and reading robot moves in Cartesian coordinates.
Stay tuned to therobotreport.com for more on this topic and other open solutions.
Some controllers for automated installations can command coordinated motion axes while concurrently controlling a robot set to run off a remote host. Lenze Americas modules for controller-based automation incorporate delta robots essentially as motion axes. These unifying controllers and a single programming environment maximize cross-functionality between motion axes and robot.
In a similar way, an Adept Robot Control Library allows control of SCARA, parallel (hexapod) and articulated robots by Omron NJ/NX controls or NY-series Industrial PCs with common instructions and programming.
Consider still another example: Mitsubishi Electric Pak/iQ offerings for the packaging industry include integrated robotics and servo and PLC programming with one piece of software. Onboard analytics help operators avoid unplanned shutdowns; machine learning and continuous-tuning algorithms optimize servo performance. A typical setup might include a robot controlled via a MELSEC iQ Platform … with a Q series PLC and integrated robot controller on the same rack. Then communication between robot controller and PLC CPU is across that rack for top speed and throughput — and simplified robot-cell setup. Networking connects other components such as inverter drives and dedicated safety controllers.
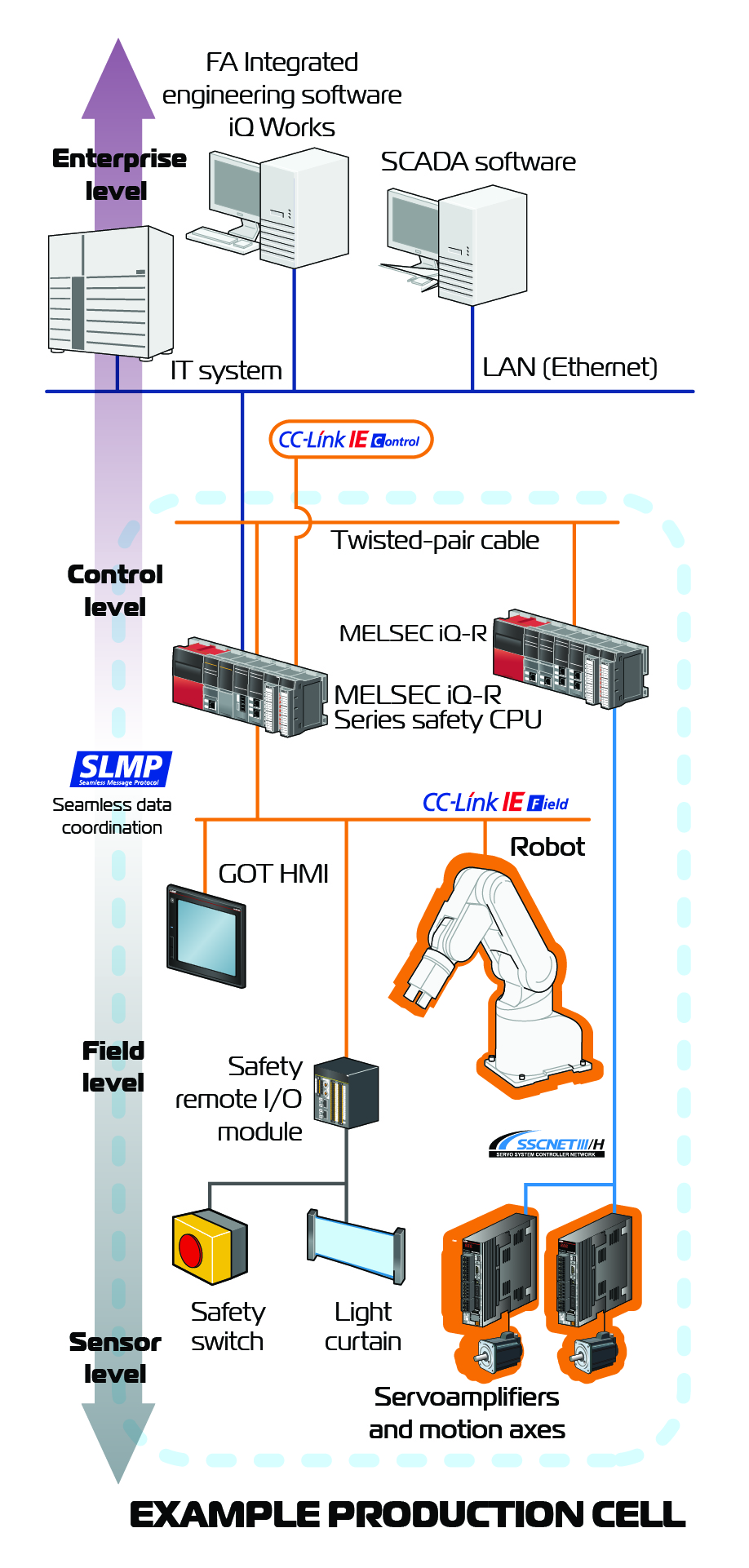
Integrating robotics with other machinery allows top overall equipment effectiveness (OEE) by going beyond simple handoffs. The trend is towards complementary control, motion, robotics, and data management. Image courtesy Mitsubishi Electric
Filed Under: PCs, Robotics • robotic grippers • end effectors, Motion Control Tips




Thank you for your insight on the unification of robotics and conventional manufacturing line. This write-up resolved a lot of my confusions on execution issues of motion control. Also, the infographic is very concise and I’d like to save it for learning reference if you don’t mind?