Stepper-motor output torque depends on a few things — including the stepper-motor type; how many poles it has; how fast it runs; and the type of drive supplying electrical power to the motor.
For the latter, read FAQ: What is a stepper drive and how do they work? for more information.
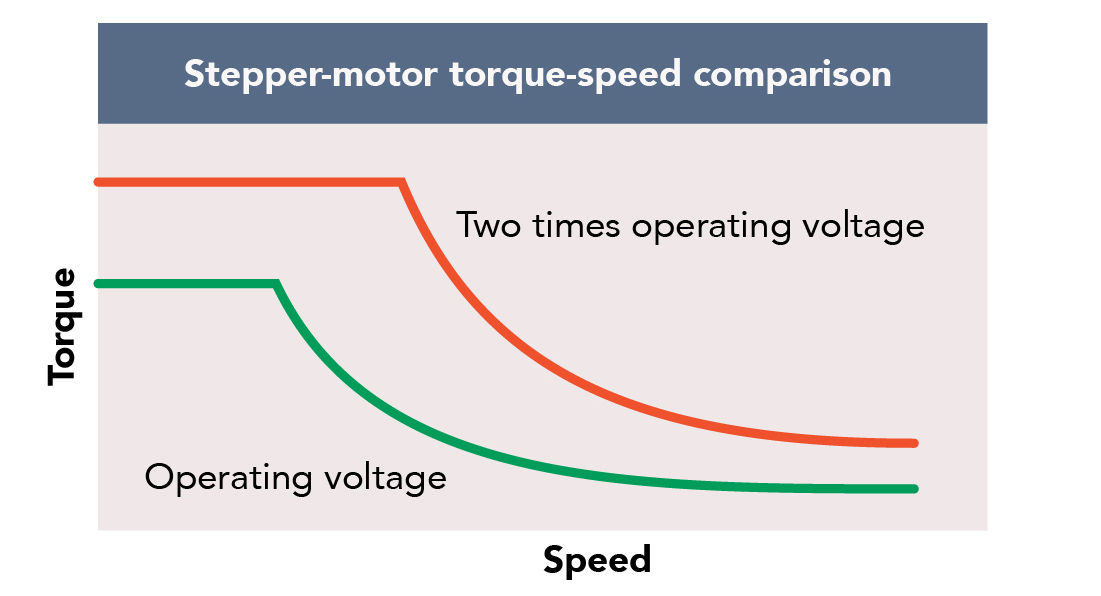
These typical torque-speed curves show how stepper-motor torque drops as speed increases. Increasing voltage offsets this effect somewhat.
More specifically, a stepper motor’s torque depends on pole count (as explained in FAQ: What is pole count and why does it matter?) Usually a higher number of poles allows for greater torque. One or two phases on provides the most torque at certain rotations, because two sets of magnets engage simultaneously. That said, microstepping diminishes maximum torque because the steps come from stepping originating from drive shaping of current (and not motor pole count).
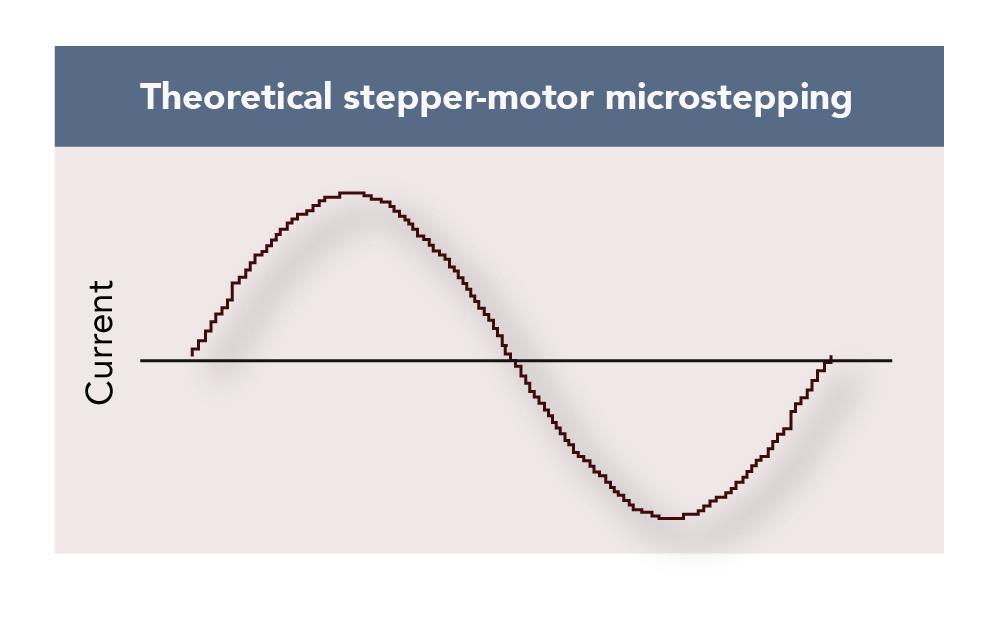
The fine steps and sinusoidal shape of a hypothetical microstepping curve are far from reality. Microstepping makes for lower maximum torque output.
At higher speed increases, torque output from stepper motors diminishes. No wonder then that most stepper motors aren’t recommended for continuous running at high speeds under such conditions. One solution is to increase supply voltage … but respect the system voltage-supply limits and the dangers of overcurrent. (FAQ: Aren’t heat and noise common stepper motor problems? details some of these.)
One caveat: Variable-reluctance stepper motors have a less pronounced torque drop at higher speeds.
Steppers have high holding torques. In other words, they’re suitable for applications that need to hold a load in position. In contrast, servomotors have high operating torque so increased speed doesn’t degrade torque output. See FAQ: How to pick between stepper motor, brush DC, and brushless motors? for more on this.
If a given application needs high holding torque for holding objects in position, operates at a relatively low speed, and must be inexpensive, then a stepper motor is suitable. If a system needs high speed and high operating torque with dynamically changing loads, a servomotor may make more sense.
Edited by Zak Khan. For more information, read Geckodrive: Step Motor Basics Guide • Micromo: Microstepping: Myths and Realities • AMCI: Stepper vs. Servo
Filed Under: Drives (stepper) + amplifiers, Motors • stepper, Motion Control Tips



