Force versus linear velocity charts are mainly a tool for engineers specifying screw-based linear actuators. In short, the charts help pick the actuator screw resolution after settling on a given actuator frame size.
Much like references that describe the capabilities of rotary motors alone, there are similar metrics that describe the capabilities of linear actuators incorporating stepper motors — including those pairing such motors with rotary-to-linear screw drives or those that run directly off a linear stepper motor, for example.
Here, instead of torque versus speed — read FAQ: What is pullout torque and why is it a critical stepper motor value? for more on this — the charts plot force versus linear velocity.
In short, the charts let engineers pick an actuator version that best meets system requirements. Here’s an example force-linear velocity chart:
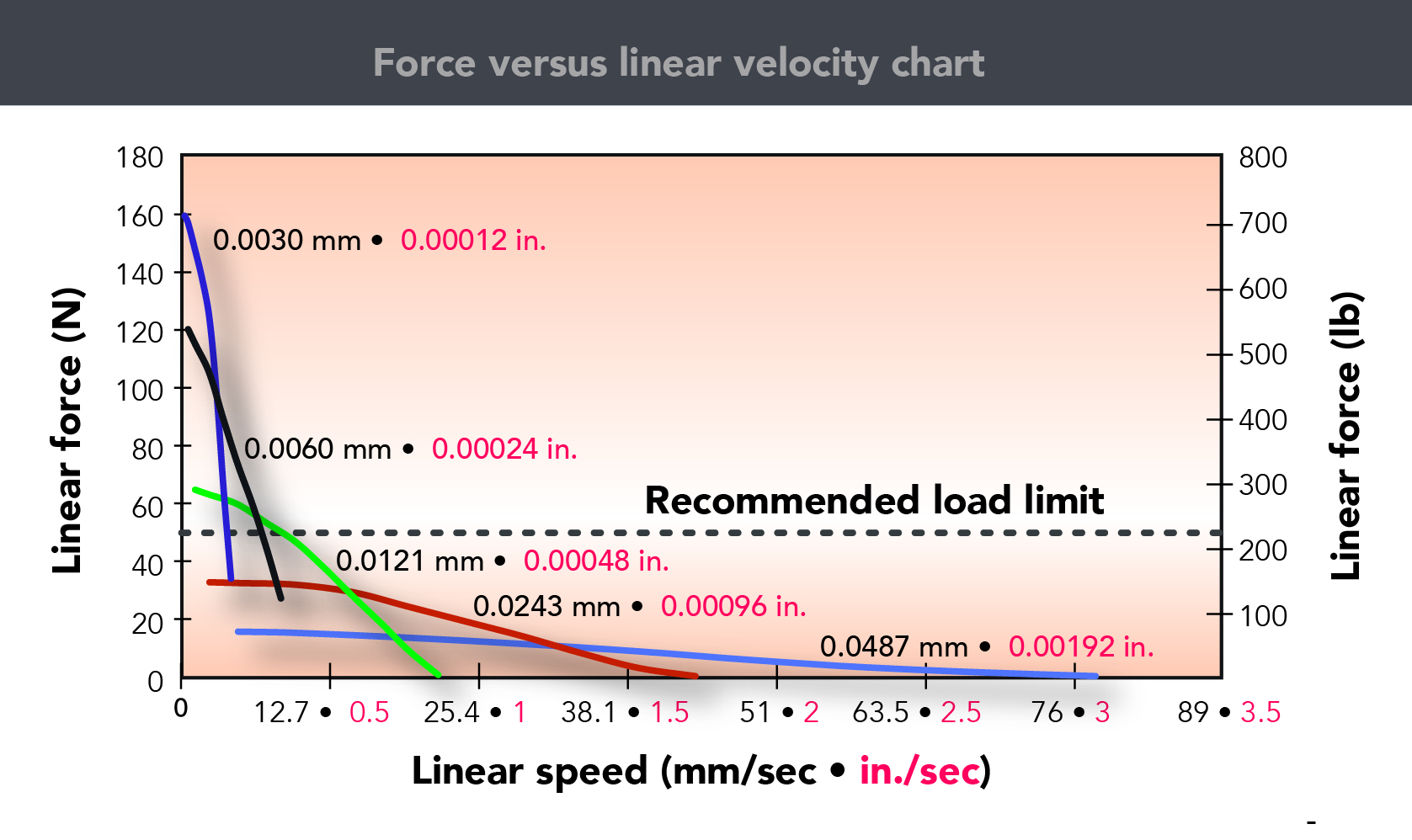
This force-speed curve for threaded-rod-type stepper-based linear actuators is a core piece of the actuator’s capability documentation.
This particular chart — adapted from a reference from HaydonKerk of AMETEK — lists values for one configuration — a threaded-rod type actuator — and how much force such an actuator produces at various speeds.
Calculate power before using force-speed charts:

Then calculate application speed:
 Next determine for potential actuator picks the power draw; drive and control options; version of bearing; and mechanical linkages and mounts. Also remember that the length of the screw rod is part of the overall system inertia.
Next determine for potential actuator picks the power draw; drive and control options; version of bearing; and mechanical linkages and mounts. Also remember that the length of the screw rod is part of the overall system inertia.
More information on force vs. speed charts:
PDF download: Parker Motion’s reference — Linear Step Motor Systems
PDF download: HaydonKerk of AMETEK — Stepper Motor Linear Actuators 101
Filed Under: Linear Motion Tips