By Arunachalam Thiraviam, SOLIDWORKS Simulation product specialist with GoEngineer.
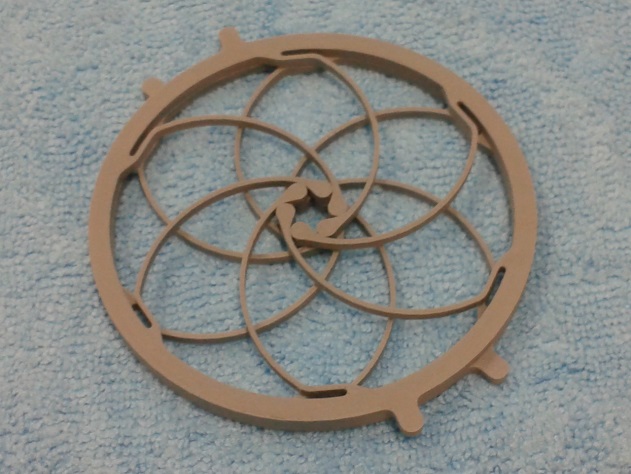
Although a compliant torsional spring does not resemble a conventional helical spring used in many mechanical devices, it has a similar function: offering resistance to an external force.

In contrast to helical springs that resist compression or tension through their geometry, compliant torsional springs resist torsion. The amount of resistance is a function of the thickness of the spring arms.
Tuning the characteristics of this spring with conventional prototyping tools is a challenging and interesting problem.
Compliant mechanisms
These springs belong to a group called compliant mechanisms, which offer mechanical resistance through their geometry and have a simple purpose: transfer a force or displacement from one link to the next through shape deformation.
A compliant mechanism is best understood when compared and contrasted to its counterpart, a rigid mechanism. An example of a rigid mechanism is a gripper or a scissor lift.

Image courtesy of the Compliant Mechanisms Research Group at Brigham Young University

A rigid mechanism relies on a set of parts connected by joints (hinges or pins) that enable relative motion between these links. A compliant mechanism relies on the flexibility of the design to execute these motions. The compliant gripper in blue mechanism relies on thin plastic hinges to perform the gripping action similar to its rigid counterpart shown below. The rigid surgical gripper requires two separate arms and a pin for the same action.
Benefits
At even tiny sizes, compliant mechanisms can transfer forces. Since they have significantly fewer parts and movable joints, they have many uses as sensors and actuators in micro-electromechanical systems (MEMs).
The other advantages of compliant mechanisms are ease of manufacturing and maintenance. As many of these mechanisms have a few parts (some just have one, such as the spring), the manufacturing cost and time are lower in comparison to their rigid counterparts. Without moving parts, the need for lubrication and joint replacements is eliminated. This can significantly lower operational costs.
3D printing
Additive manufacturing technology has enabled engineers to manufacture complex geometry with metals and plastics.
Printing the mechanism shown below was a far more viable alternative to injection molding owing to the narrow arms and the clearances between the moving parts.
3D printing enabled the user to scale the part based on its application without the need to redesign any tooling for its manufacture.
Access to 3D printing technology such as the FDM and PolyJet enables the use of a variety of real and digital plastic materials for printing. 3D printing software enables users to control layer density and the print path to optimize the weight and strength of the final print.
The model shown above was printed with an ASA material at a 0.005 in. resolution on a Stratasys Fortus 400 FDM printer with slightly modified layer properties to achieve maximum density on the slender iris arms.
Simulation
Finite Element Analysis (FEA) technology enables easy verification of the structural strength of the slender arms and the stiffness of the overall spring before manufacturing.

The graphic above represents the stress distribution on the spring during actuation determined through FEA.

The chart above indicates the force required for the spring actuation. Using this data, the thickness of the spring arms was set to achieve a certain stiffness without compromising the spring’s structural strength.
The FEA analysis shows that the critical areas that govern strength are at the outer fibers of the arms and the connection between the arms and the outer ring. Notice also the characteristic of the force-displacement curve indicating the nonlinear stiffness of the spring.
FEA tools, such as SOLIDWORKS Simulation, provide valuable feedback, enabling engineers to confidently make changes to existing products or to design new ones.
GoEngineer
www.goengineer.com
Filed Under: 3D printing • additive • stereolithography



Tell Us What You Think!