These robots may look like they’re from a science fiction novel, but they aren’t. These useful tools are on the International Space Station, and they’re operated out of Houston.
by Terry Persun, Technology Journalist
On February 24, 2011, the first Robonaut 2 launched on his way to the space station aboard the space shuttle Discovery on the STS-133 mission. This was a historic event, the first time a humanoid robot went into space with the primary job of demonstrating that dexterous robots can operate in space. The goal was for the Robonaut 2 to be able to venture outside the space station and help human spacewalkers make repairs or additions to the station, as well as perform scientific work.
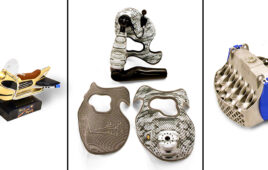
The Robonaut 2 impressed the mission managers so much that they allowed it to go on the space shuttle Discovery’s final trip. Robonaut 2’s helmet was made from six modular components. Here, you can see some of the transparent pieces that were necessary for cameras installed inside the helmet to peer out.
Robonaut 2 was a jointly developed robot by GM and NASA. The STS-133 mission was to deliver the Permanent Multipurpose Module, packed with supplies and critical spare parts, as well as to deliver the Robonaut 2, the dextrous humanoid astronaut helper, to the International Space Station. Robonaut 2 will not return to Earth.
According to NASA, a robot that is meant to work with humans and use human tools begins to look human-like by default. The differences between Robonaut 2 and a human, though, tend to end there. Robonaut 2’s head, for example, houses vision equipment, not its controller. In fact, the control boards, or brains, are located in the only space large enough to house it – in its stomach area. The robot that went to the space station is almost a meter tall and weighs about 300 pounds.
Although the Robonaut was originally designed as a prototype to be used and tested on Earth, when it was unveiled the system was so impressive that mission managers decided to go ahead and send it to the space station – with a few upgrades, that is. The outer skin materials were exchanged to meet the space station’s stringent flammability requirements; shielding was added to reduce electromagnetic interference; and processors were upgraded to increase the robot’s radiation tolerance. Even fans were replaced with quieter ones because of noise restrictions inside the space station, and the power system was rewired to run on the station’s direct current system rather than the ac used on the ground.
Robonaut 2’s head, or helmet area, is made of six pieces, not one. Prototypes of the modular components were manufactured by Solid Concepts, Inc (Valencia, CA). The company used an SC5500 material to create six master patterns through their urethane casting process. The company’s QuantumCast™ process uses a proprietary multi-step technology that applies vacuum, heat, and pressure to process advanced formula polymers yielding void-free, strong, and stable pre-production and short-run production components. Through focused attention to process control, Solid Concepts’ QuantumCast technology delivers optimum mechanical properties to users. Once created, the masters were sent to the company’s Poway facility where they were finished per NASA specifications. After finishing was complete, the parts were molded and then cast. The transparent pieces, the helm skull and helm light modules, were cast in AFP3500; while the opaque pieces, the helm face, helm occipital cover, helm perietal cover, and eye sockets, were cast from AFB3100FR material. The eye sockets were designed to hold four visible light cameras. Two of the cameras provide stereovision, and two are auxiliary cameras. A fifth infrared camera is housed in the mouth area for depth perception.
The Robonaut 2 astronaut helper is ready for operation with its new helmet.
The NASA Robonaut 2 project was for five sets of helmets that were to be shipped in less than three weeks to the Jacobs Technology ESCG Group in Houston, TX for NASA’s Johnson Space Center. It was in Houston that the five helmets were painted gold, assembled to incorporate the electronics components, plus the framework, visors, and hardware. Robonauts using the Solid Concepts helmets are going through additional testing in Houston, while an earlier version helmeted Robonaut 2 was sent to the International Space Station for on-site testing. That Robonaut 2 was remotely controlled from the NASA Johnson Space Center during all testing.
Some of the initial tasks Robonaut is expected to perform include velocity air measurements and handrail cleaning. These and other tasks are simple, but necessary tasks that require a great deal of crew time. Tasks are expected to be performed autonomously, with only periodic status checks. The robot practices flipping switches and pushing buttons on a task board. Over time, it is expected to graduate to more complex tasks, such as using hand tools. In fact, as the technology matures, it is expected that similar robots can be sent deeper into space, to test the system in extreme thermal and radiation conditions. After that, as robotic capabilities increase, other Robonauts could be expected to explore near-Earth objects such as asteroids and comets and, eventually, Mars and Mars’ moons, Phobos and Deimos.
Mobility options are already being tested for the explorations ahead. A Robonaut 2 has been paired with a four-wheeled base and tested during a Desert RATS (Research and Technology Studies) mission in the Arizona desert.
3D printed mockup of R2 helps trains astronauts to use the original
Wyle, a leading provider of science, aerospace engineering, and information technology services to the federal government on long-term outsourcing contracts, helped NASA prepare the Robonaut 2 (R2) dexterous humanoid robot for launch to the International Space Station (ISS).
Components for R2 mockup were made by RedEye On Demand digital manufacturing service.
One of Wyle’s responsibilities was to build a one-to-one scale high-fidelity mockup of R2 for use in the simulation of potential missions. The exterior of the mockup had to duplicate the geometry and appearance of the actual R2. The limbs of the mockup had to be easily moved into the same positions as the real robot. And, the mockup had to withstand rough handling that it might receive during simulation and training exercises.
“The geometry is complex and we were under time constraints to produce the mockup,” said Robert Stevenson, mechanical designer for Wyle. The parts have so many compound contours that it would have been very difficult to hold them during finish machining. One consequence is that they would have had to be thicker than on the real R2, which would have added to the weight of the mockup. The estimated delivery time for conventional machining for the mockup was 8 months and the cost was $180,000.
Actual R2 at Kennedy Space Center before it was carried to International Space Station on the last flight of Space Shuttle Discovery
“RedEye On Demand was a good fit because of FDM’s ability to create complex geometries,” said Jeffrey Gangel, RedEye On Demand Account Manager. “FDM also provides the high level of accuracy needed to ensure that the many pieces required fit together during assembly. And, we were able to meet the tight timeline for the project.”
Said Stevenson, “The ABS material met our strength and durability requirements. RedEye was also very helpful in educating me in what I needed to do to get our CAD models ready for digital manufacturing.”
It took only two weeks and cost $36,000 for RedEye to make all of the parts required for the mockup. The interior of the mockup is made from square tubing for strength.
The mockup is positioned by tension in its joints like a mannequin.
“NASA was very happy with it,” said Gina Young, Project Manager for Wyle. “The feedback we received is that the mockup has made it much easier for the crew to train and prepare to use the R2.”
NASA
www.NASA.org
Solid Concepts Inc.
www.SolidConcepts.com
RedEye On Demand
www.redeyeondemand.com
Filed Under: 3D printing • additive • stereolithography, Make Parts Fast